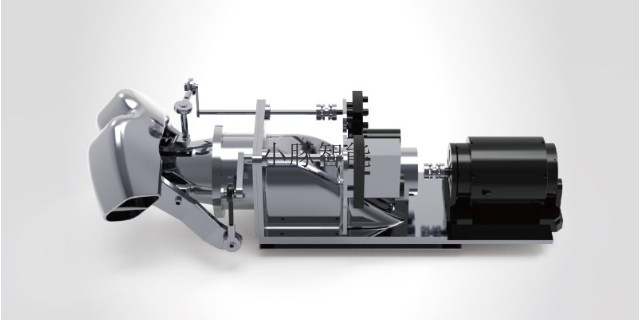
海洋牧场无人船的船体设计需充分适配海上作业环境,兼顾机动性与稳定性。船体尺度通常控制在船长1m至20m的范围内,采用轻量化、高密度的船体材料,降低船舶吃水深度的同时提升抗风浪能力。船体线形设计需优化流体动力性能,减少航行过程中的阻力,提升能源利用效率。此外,船体布局需合理规划任务载荷区域,为投饵机、监测设备、储能装置等提供充足的安装空间,同时保障设备的防护安全。特殊设计的船体结构还能削弱航行扰动与振动噪声,避免对声学、光学监测设备的数据采集精度产生影响。目前,无人船喷水推进器正朝着单机功率50000KW以上功率的大型化、船体推进器一体化、矢量控制方向发展。大连水动力海洋牧场无人船

生态监测是海洋牧场可持续发展的主要,海洋牧场无人船在此领域发挥着不可替代的作用。它搭载的水质传感器可实时采集数据,并通过无线传输系统发送至控制中心,形成动态监测报告。当检测到水质指标异常,如酸碱度失衡或污染物超标时,系统会自动报警,提醒管理人员采取措施。同时,无人船配备的水下摄像头能观察鱼类生长状态、藻类分布情况,甚至追踪天敌活动轨迹,为生态平衡调控提供依据。通过长期的数据积累,海洋牧场无人船还能帮助建立养殖环境变化模型,预测生态风险,让牧场管理更具前瞻性,为实现“生态友好型”养殖模式奠定基础。吉林海洋牧场无人船参数耿涛团队在业内率先提出“全自主无人艇”概念。当时,国内无人艇技术研究仍处于初级阶段船舶智能化改造。

在生态型海洋牧场建设中,海洋牧场无人船助力实现养殖与生态保护的协同发展。通过精细的环境监测数据,养殖者可及时掌握海域生态变化,调整养殖密度与投喂策略,避免过度养殖对海域环境造成破坏。无人船搭载的垃圾清理设备可及时清理海域内的漂浮垃圾与养殖废弃物,维护海域生态清洁;其非接触式的作业方式也减少了对海洋生物自然生长环境的干扰。此外,无人船获取的长期生态数据可为海洋牧场的生态修复方案制定提供支撑,推动构建“养殖-养护-修复”一体化的生态牧场模式。
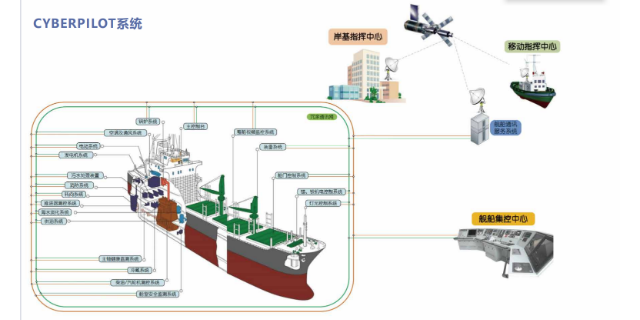
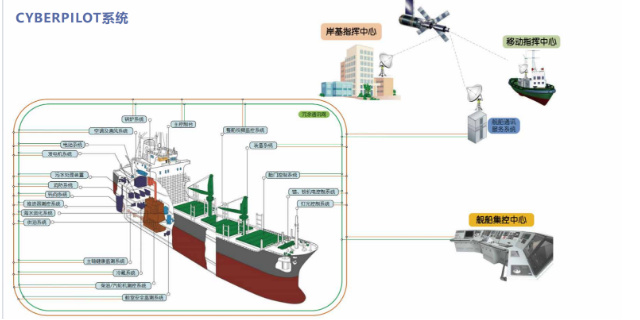
海洋牧场无人船并非孤立运行,而是通过物联网技术与其他设备形成协同作业网络。它可与水下机器人联动,前者负责水面巡航与数据汇总,后者深入水下监测网箱状态、鱼类活动情况,两者数据相互补充,构建起立体监测体系。在投喂作业中,无人船能与岸边饲料储备系统实时通信,根据养殖密度和鱼类生长阶段自动计算所需饲料量,由岸上设备精细配送至无人船,再由其完成投喂,减少中间环节的损耗。此外,它还能配合气象监测站获取实时风力、浪高数据,动态调整巡航速度与路线,确保作业安全。这种多设备协同模式,让海洋牧场的管理形成闭环,提升了整体运营效率。无人船喷水推进器叶轮通过联轴器与驱动轴相连,水流从喷口高速喷出,在反作用力的作用下,船体前进。
海洋牧场无人船积累的海量数据,通过算法模型处理后可转化为具体的管理决策建议。例如,将连续一周的水温、溶解氧数据与鱼类进食量对比分析,能得出比较好投喂时段;结合洋流方向与网箱位置数据,可优化网箱布局以减少鱼类应激反应。这些数据还能辅助判断养殖周期,当监测到鱼类平均体重达到预设阈值时,系统会自动提醒捕捞时间,避免过度养殖导致的资源浪费。对于多区域牧场,无人船可汇总各区域数据,生成横向对比报告,帮助管理人员发现不同区域的养殖差异,针对性调整管理策略。小豚智能参与研制的“创智号”试验船在蓬莱中柏京鲁船业有限公司附近海域完成了航行试验。吉林海洋牧场无人船参数
船舶智能化改造积极进行海洋科技创新,在无人船这样的细分领域创新,令人印象深刻。大连水动力海洋牧场无人船
海洋牧场无人船在日常作业中积累了大量的海洋环境数据,这些数据正在催生新的管理模式。通过部署多艘无人船组网监测,可以构建海洋牧场的数字孪生系统,实现养殖环境的可视化管理和智能预警。小豚智能开发的云端数据分析平台,能够对无人船采集的水质、气象等参数进行深度挖掘,为养殖密度调控、投喂策略优化提供科学依据。这种数据驱动的精细化管理方式,正在帮助养殖企业从经验型向智能型转变,提升整体运营效益的同时,也为海洋大数据应用开辟了新途径。 大连水动力海洋牧场无人船