海洋牧场无人船的动力系统设计需兼顾作业续航与环境适应性,通常采用燃油或电力作为动力源,部分高级机型可实现油电混合驱动。电力驱动模式具有噪音低、污染小的优势,适用于近岸生态敏感型海洋牧场作业;燃油驱动则具备续航里程长、动力强劲的特点,更适合深远海长时间作业。动力系统需为船舶航行提供稳定的推进力,同时为感知设备、监测仪器、通信系统等提供持续的电力支持。其设计需充分考虑海洋环境的特殊性,具备良好的防水、防腐蚀性能,以适应高湿度、高盐雾的海上作业环境,保障设备长期稳定运行。小豚自研无人船喷水推进器适用于游艇,无人船动力系统等场景。贵州现代海洋牧场无人船

海洋牧场无人船的研发过程体现了产学研深度融合的创新模式。小豚智能依托广东省全自主无人艇工程技术研究中心,与多所高校建立了联合实验室,共同攻克无人船在复杂海况下的控制难题。在实际应用中,科研团队根据养殖企业的反馈持续优化算法,使无人船能更好适应不同海域特点。这种"企业出题、高校解题、市场验题"的协作机制,不*加速了技术迭代,也为海洋专业人才培养提供了实践平台。目前,海洋牧场无人船已成为多个海洋类院校的教学案例,助力新一代海洋工程技术人才的培养。安徽海洋牧场无人船价格咨询船舶智能化改造传统有人驾驶开发升级改造成无人船。

海洋牧场无人船的研发依托于小豚智能强大的技术积累和实验平台。公司在东莞松山湖建有全自主无人艇试验基地,为无人船的稳定性、抗风浪性能和环境适应性提供了测试条件。在关键技术方面,海洋牧场无人船采用了小豚智控和小豚智讯等主要部件,确保了导航精度和通信可靠性。此外,无人船还融合了人工智能算法,能够自主学习海洋环境变化规律,优化作业路径。小豚智能与多家高校和科研院所合作,持续推动无人船在海洋牧场领域的创新应用,相关成果已通过检验和鉴定,技术成熟度达到行业先进水平。
海洋牧场无人船的船体设计需充分适配海上作业环境,兼顾机动性与稳定性。船体尺度通常控制在船长1m至20m的范围内,采用轻量化、高密度的船体材料,降低船舶吃水深度的同时提升抗风浪能力。船体线形设计需优化流体动力性能,减少航行过程中的阻力,提升能源利用效率。此外,船体布局需合理规划任务载荷区域,为投饵机、监测设备、储能装置等提供充足的安装空间,同时保障设备的防护安全。特殊设计的船体结构还能削弱航行扰动与振动噪声,避免对声学、光学监测设备的数据采集精度产生影响。它的出现,标志着海洋牧场管理迈入了智能化、无人化的新时代——小豚智能无人船。
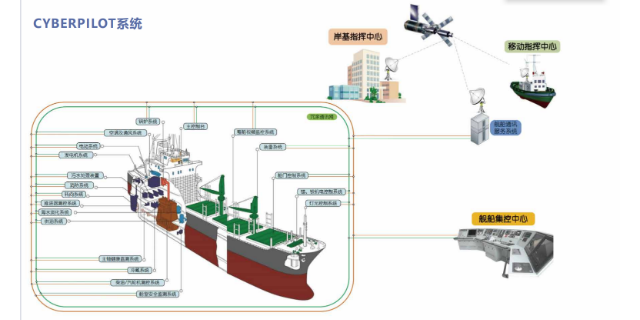
在应急处置场景中,海洋牧场无人船可快速响应完成多样化的应急任务,提升海洋牧场的风险应对能力。当海域发生水质突变、网箱破损等突发情况时,无人船可快速抵达事发区域,通过搭载的监测设备获取实时数据,为应急决策提供依据;若发生网箱泄漏,无人船可携带封堵设备前往处置,同时跟踪泄漏渔获的扩散轨迹;在海上搜救任务中,无人船可搭载搜救设备开展大范围搜索,扩大搜救范围并提升搜救效率。其快速响应与灵活作业的特点,使海洋牧场无人船成为海洋牧场应急管理体系中的重要组成部分。小豚船舶智能化改造,构建了集底层交互、数据显示和航行控制的一体式船舶无人化解决方案架构。江苏多功能海洋牧场无人船
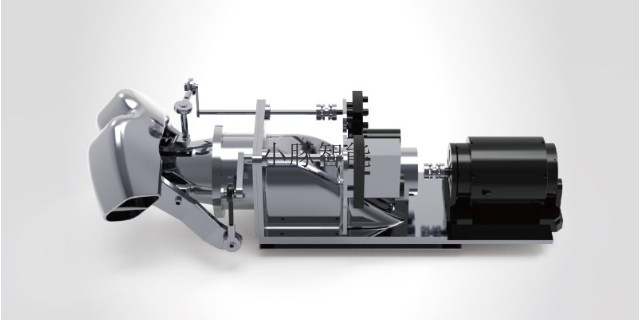
无人船喷水推进器将电机产生的动力转变成船舶行进的推力,以克服船舶在水中航行的阻力,推动船的行进。贵州现代海洋牧场无人船
除环境监测外,无人船可执行投饵、网箱巡检、死鱼清理等自动化作业任务。喷水推进器的高机动性使无人船能在狭窄的网箱间灵活穿梭,精细控制航行轨迹。例如,通过视觉识别和机械臂配合,无人船可自动定位投饵点,均匀撒播饲料,避免人工投喂的不均匀问题。此外,无人船还能携带清洗装置,定期清理网箱附着物,减少生物淤积对养殖环境的影响。东莞小豚智能技术有限公司的无人船系统支持模块化扩展,可根据不同海洋牧场的需求定制功能,提升整体运维效率。贵州现代海洋牧场无人船