- 品牌
- 帝木
- 型号
- 齐全
- 基材
- 无
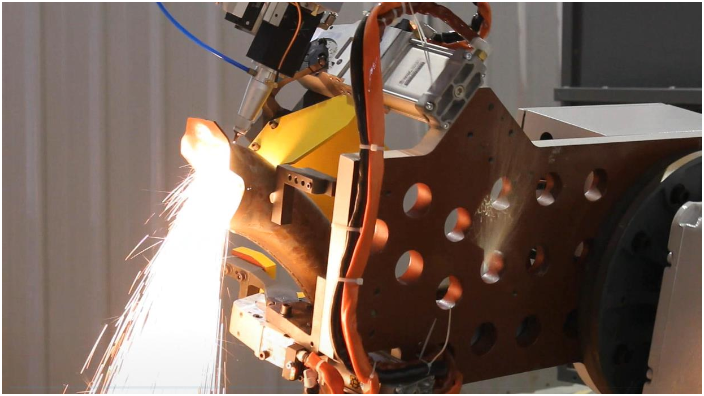
机器人点焊的工作原理主要依赖于电流通过焊接电极产生的热量,将金属工件局部加热至熔融状态,从而实现焊接。具体而言,机器人通过控制焊接电极的压力和电流,精确地将两块金属工件在接触点上进行加热和熔化,形成牢固的焊接接头。机器人系统通常配备有高精度的传感器和控制系统,能够实时监测焊接过程中的温度、压力和时间等参数,确保焊接质量的稳定性。此外,现代机器人点焊系统还可以与其他自动化设备如输送带、视觉系统等进行联动,实现全自动化生产,提高整体生产效率。机器人点焊生产线提高了焊接效率,减少了人工成本。镇江机器人点焊生产线

随着科技的不断发展,机器人点焊生产线正朝着智能化方向迈进。一方面,通过引入人工智能技术,机器人能够自主学习和优化点焊参数。例如,利用机器学习算法,根据焊点的质量反馈数据,自动调整点焊的电流、时间和电极压力等参数,提高点焊质量。另一方面,智能传感器的应用越来越广。视觉传感器可以让机器人实时识别焊件的形状和位置,即使焊件在输送过程中有一定的偏差,机器人也能准确地找到焊点位置。此外,生产线的控制系统可以与企业的生产管理系统集成,实现生产计划、质量监控和设备维护的智能化管理,进一步提高生产效率和管理水平。镇江机器人点焊生产线生产线的布局经过精心设计,提升了工作效率。
机器人点焊生产线在多个行业中得到了广泛应用,尤其是在汽车制造领域。汽车行业对焊接质量和生产效率的要求极高,机器人点焊能够满足这些需求,确保车身结构的强度和安全性。此外,家电行业也在逐步引入机器人点焊技术,以提高产品的一致性和生产效率。电子产品的制造同样受益于机器人点焊,尤其是在小型精密部件的焊接上,机器人能够提供高精度的焊接解决方案。随着技术的不断发展,机器人点焊的应用领域还在不断扩展,未来有望在航空航天、医疗器械等制造领域发挥更大的作用。
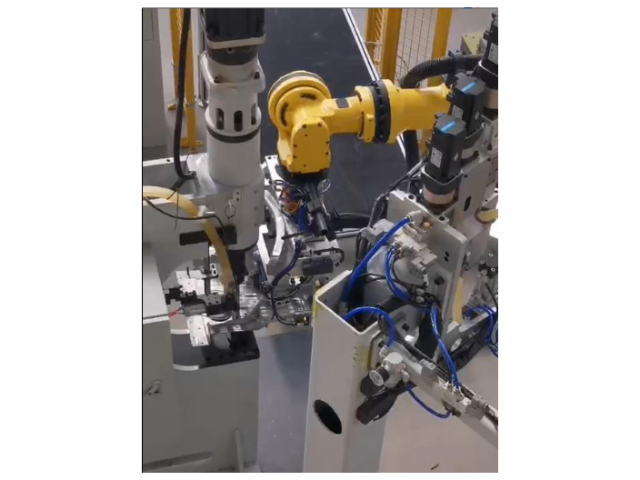
点焊生产线的布局设计需要综合考虑多个因素。首先要根据焊件的生产流程和工艺要求确定各个工位的顺序。例如,如果焊件需要先进行预加工,然后再进行点焊,那么预加工工位要在点焊工位之前。要考虑机器人的工作半径和运动空间,确保机器人在点焊过程中不会相互干扰或与其他设备发生碰撞。物料输送装置的路线要与机器人的工作区域相匹配,保证焊件能够准确地到达和离开点焊工位。同时,还要考虑设备的维护和检修空间,在生产线周围预留足够的通道,方便维修人员对机器人、点焊设备和输送装置进行维护。合理的布局设计能够提高生产线的运行效率,减少占地面积,并且便于管理。生产线的设计充分考虑了人机协作,提高了效率。

根据消费者需求进行机器人点焊生产线的设计可以参考以下步骤:设计合理的布局结合生产场地的空间大小和形状,规划生产线的布局,确保物料流动顺畅,减少运输时间和成本。考虑操作人员的工作便利性和安全性,合理安排机器人、工装夹具、焊接电源等设备的位置。定制工装夹具根据产品的形状和尺寸,设计的工装夹具,确保产品在焊接过程中的定位准确、夹紧牢固。工装夹具应易于更换和调整,以适应不同产品的生产需求。配置高效的控制系统选用先进的控制系统,实现对机器人、焊接电源、送丝机构等设备的精确控制和协同运作。开发易于操作和监控的人机界面,方便操作人员进行参数设置、生产调度和故障诊断。机器人点焊技术能够有效降低生产过程中的缺陷率。江苏智能工厂机器人点焊生产线安装
生产线的自动化程度高,减少了人工干预的需求。镇江机器人点焊生产线
机器人点焊生产线在提升生产效率方面有着明显优势。与传统手工点焊相比,机器人可以不间断地工作,无需休息,极大地增加了有效工作时间。其高速的动作和精细的定位能力,使得点焊一个焊点的时间大幅缩短。而且,由于机器人可以同时对多个焊点进行操作,例如在汽车车架的点焊中,多个机器人可以协同工作,同时对车架的不同部位进行点焊,很大加快了生产进程。此外,物料输送装置的高效运行确保了焊件的快速流转,减少了等待时间。通过优化控制系统的参数和节拍,可以进一步提高生产线的整体效率,使单位时间内生产的焊件数量大幅增加,满足大规模生产的需求。镇江机器人点焊生产线
- 常州智能机器人点焊生产线 2026-07-05
- 江苏智能工厂机器人点焊生产线解决方案 2026-07-05
- 连云港智能机器人点焊生产线安装 2026-07-04
- 盐城智能机器人点焊生产线安装 2026-07-04
- 苏州机器人点焊生产线集成商 2026-07-03
- 南京机器人点焊生产线上下料 2026-07-03
- 南京机器人点焊生产线装配 2026-07-02
- 扬州智能工厂机器人点焊生产线安装 2026-07-02
- 上海智能工厂机器人点焊生产线搭建 2026-07-01
- 无锡智能机器人点焊生产线检测 2026-07-01
- 镇江智能工厂机器人点焊生产线服务商 2026-06-30
- 连云港智能机器人点焊生产线服务商 2026-06-30