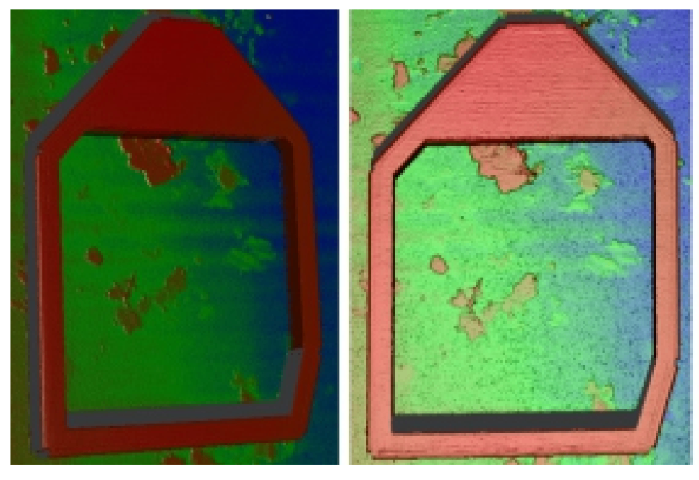
无论系统外观如何变化,实现焊接的前提之一是视觉定位能力。视觉定位视觉焊锡系统强调视觉技术在焊接设备中的作用,不只加装相机,而是一套从图像采集、处理、坐标变换到运动补偿的技术链条。定位精度和速度影响设备所能达到的加工水准。实际应用中视觉定位需应对多种挑战:工件来料位置和角度的随机性需要系统支持多特征匹配或模板学习;为提升效率需采用飞拍定位技术,在运动过程中完成图像采集和位置解算。视觉系统的稳定性也较为重要,需确保连续长时间工作下不因环境光变化或相机发热导致定位漂移。对于非标自动化设备厂,选择开放性好、易于二次开发的视觉定位软件平台,可较灵活集成到各种定制化焊锡设备中。深圳市旗众智能科技有限公司作为提供运动控制与机器视觉技术的企业,其视觉焊锡系统融合了视觉定位算法,支持多种定位模式,帮助设备商构建视觉定位焊接方案。五轴视觉焊锡系统实现多角度自由焊接,面对结构复杂零件的各方位焊点加工较为从容。苏州单工位视觉焊锡系统咨询
为生产线询价时,视觉焊锡系统报价是由软件授权、视觉硬件组件、运动控制卡、工艺包定制以及技术服务等部分构成的综合方案。软件价格取决于所需功能模块,如是否包含翻面焊工艺算法,或是否需要与MES系统进行数据对接。视觉硬件部分,相机分辨率、镜头精度、光源配置方案会影响成本和成像效果。运动控制卡的轴数和性能等级也是因素。许多供应商的报价包含初期工艺调试与参数设定服务,这对确保系统在特定产品上稳定运行较为重要。获取报价时,提供产品信息、产能要求以及希望实现的自动化程度,有助于得到较具可比性的方案。深圳市旗众智能科技有限公司专注于运动控制与机器视觉技术,其提供的视觉焊锡系统方案能根据PCB、电子元器件等不同焊接场景需求进行配置。烟台视觉焊锡系统怎么购买翻面焊视觉焊锡系统能自动翻转和定位产品,使双面焊接实现全程自动化。

设备厂商规划焊锡自动化产线时,选择视觉焊锡系统需从集成适配性、工艺覆盖度、长期稳定性和后续服务支持等方面考量。首先需看系统能否与现有运动平台、机械结构对接,硬件接口和软件协议是否开放兼容。其次工艺库是否丰富,设备可能需应对PCB板上不同元器件,有的需要点焊,复杂排线可能需要拖焊甚至斜线焊,系统是否支持这些工艺并允许自定义参数。系统稳定性体现在长时间运行下视觉定位重复精度能否保持,焊点检测算法是否能持续发现漏焊或连锡。供应商的技术支持能力影响设备交付顺利程度。深圳市旗众智能科技有限公司作为专精特新企业,其视觉焊锡系统软件集成视觉定位、运动控制与焊锡工艺,支持多种焊接工艺与实时焊点检测,并适配单双工位及在线式设备。
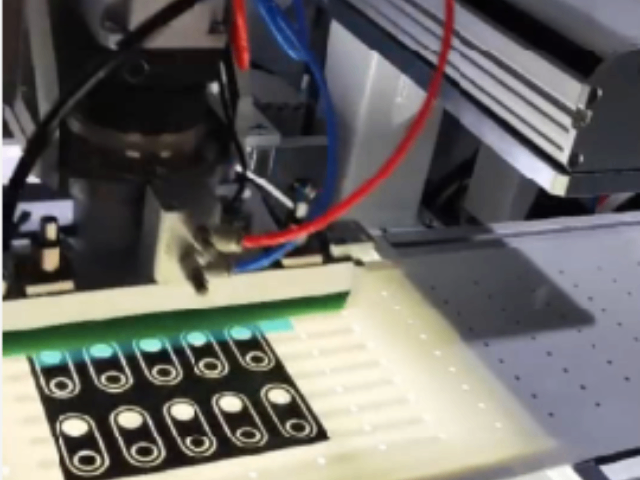
设备制造商规划生产线时,常面临选择在线式视觉焊锡系统还是单独工位设备的问题。在线式系统的价值在于与流水线的集成能力,它不是孤立加工单元,而是作为产线的智能环节。这类系统通常采用输送带或移载机构配合,通过飞拍定位技术在运动中对PCB板或工件进行坐标校正,无需停止流水线即可完成焊接,提升生产节拍,减少物料周转带来的时间损耗和损伤。对于生产手机主板、智能穿戴设备内部连接器等大批量、标准化程度高的产品,在线式方案能体现效率优势,要求视觉系统具备高速图像处理能力和稳定通讯接口,以确保与上位机或MES系统实时数据交换。深圳市旗众智能科技有限公司的视觉焊锡系统软件专为适配在线式设备而设计,集成视觉定位与运动控制技术,支持飞拍模式,并能对接产线。获取准确的视觉焊锡系统报价,需提供清晰的工艺要求和设备配置清单。

FPC视觉焊锡软件需解决柔性电路板的技术难题。FPC材质柔软、易变形,焊接过程中难以保持固定形状与位置,对视觉定位系统的稳定性和纠偏能力有较高要求。设备制造商关注软件能否应对FPC的翘曲、拉伸等形变,通过多特征点匹配或轮廓匹配算法实现柔性对位。FPC上的焊盘通常较小且密集,焊锡膏量需控制,焊接温度和时间也需留意,以免烫伤柔软基材。软件需集成针对FPC材料的工艺包,与高响应速度运动平台配合,实现轻柔、精确焊接作业。深圳市旗众智能科技有限公司的视觉焊锡系统凭借定位精度和稳定运动控制,能够处理FPC定位问题,其多种焊接工艺支持与实时检测功能为FPC焊接提供技术保障。微电子元件视觉焊锡系统应对芯片、小引脚元件的精密焊接,操作稳定,精度较高。苏州单工位视觉焊锡系统咨询
CCD视觉定位焊锡系统通过高清相机捕捉产品特征,焊点定位较为快速准确。苏州单工位视觉焊锡系统咨询
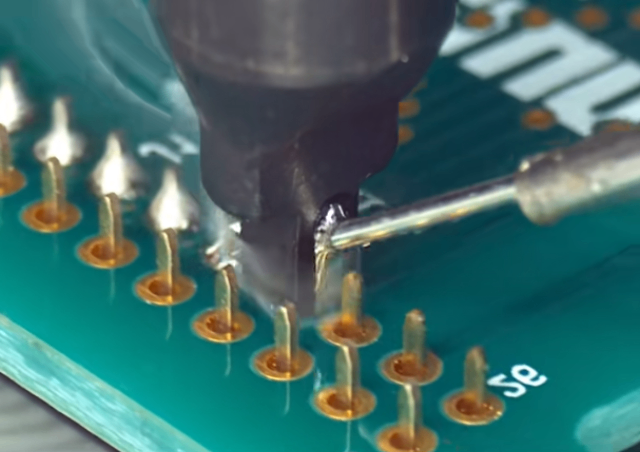
拖焊工艺用于多引脚集成电路或排针焊接,要求焊锡头在引脚阵列上连续匀速拖动,一次完成整排引脚上锡。拖焊视觉焊锡软件的关键在于实现平滑的直线或曲线运动轨迹控制,并同步控制送锡量及温度。软件根据引脚间距、长度及PCB焊盘尺寸,规划拖焊路径、速度与角度。拖动过程中需保持烙铁头与引脚接触的稳定性,确保焊锡填充到每个引脚与焊盘之间,形成焊锡面,避免拉尖、桥连或虚焊。视觉系统扮演双重角色:焊前定位引脚起始点,焊后扫描检测连锡、漏焊等缺陷,对图像处理速度与运动控制协同性有较高要求。拖焊软件还能根据不同产品特性存储和调用不同工艺参数包,实现切换。深圳市旗众智能科技有限公司的视觉焊锡系统软件支持拖焊工艺,通过运动轨迹控制与实时工艺参数调节,帮助自动化设备完成多引脚连续焊接作业。苏州单工位视觉焊锡系统咨询