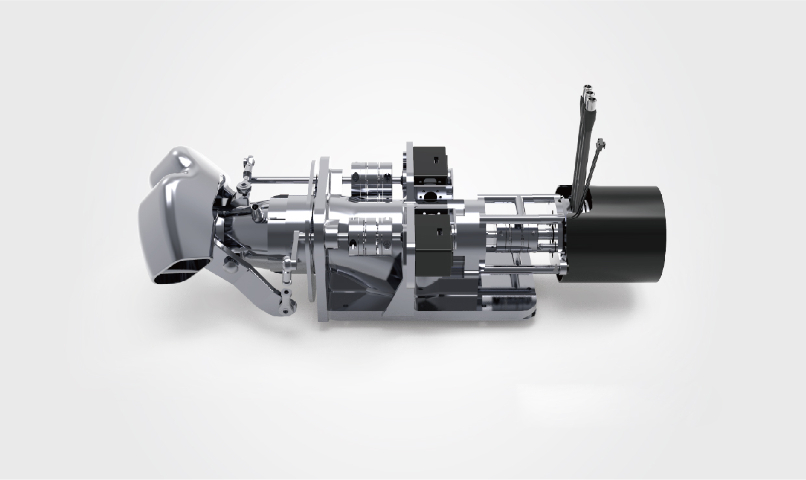
无轴推进器是一种创新的船舶推进装置,其主要特点在于取消了传统推进器的机械传动轴结构,转而采用电机直接驱动螺旋桨的设计。这种设计通过将电机集成在桨叶周围或直接嵌入推进器内部,明显减少了机械传动部件的数量,从而降低了能量损耗和机械故障风险。无轴推进器的运行依赖于电磁力直接作用于螺旋桨,使其旋转并产生推力,这一过程不仅提升了能量转换效率,还减少了振动和噪音。由于无需复杂的传动系统,无轴推进器的结构更为紧凑,适合安装于空间受限的船舶或水下机器人中。此外,其模块化设计便于维护和更换,进一步降低了长期使用成本。无轴推进器的技术优势在水面无人船和水下机器人领域尤为突出。传统推进系统因传动轴的存在容易受到腐蚀和磨损,而无轴推进器通过消除这一环节,明显提升了设备的可靠性和使用寿命。同时,无轴设计减少了水下阻力,使得航行更加流畅高效。目前,无轴推进器已广泛应用于环保监测、水下测绘和应急救援等领域,为无人船的性能提升提供了重要支持。随着技术的不断成熟,无轴推进器有望成为未来智能船舶的主要部件之一。小豚智能通过无轴推进器技术,实现了无人船动力系统的全数字化准确控制。广东低振动无轴推进器能效提升方案

无轴推进器的未来应用,有望在更多新兴领域实现突破。随着海洋开发力度的加大,其可能被应用于深海无人探测设备,凭借耐高压特性助力海底资源勘探;在智能航运领域,与自动驾驶技术结合,为小型内河货船提供动力支持,推动内河运输的智能化转型;在休闲体育领域,搭载无轴推进器的小型无人船可能成为水上运动的辅助设备,为冲浪、帆船等运动提供安全监测与应急支援。随着技术的不断进步,无轴推进器的性能将进一步提升,其应用场景也将从现有领域向更广阔的空间拓展,为水面无人驾驶技术的发展注入持续动力。山东无人船无轴推进器电磁驱动原理小豚智能创新性地将无轴推进器与AI算法结合,实现了自适应水流环境的动态推力调节。
作为东莞小豚智能技术有限公司主要产品线的重要组成,无轴推进器的发展历程与公司技术积累紧密相连。依托“广东省全自主无人艇工程技术研究中心”等研发平台,公司团队将多年无人船技术研究成果融入推进器设计,通过持续的实验测试与现场验证,不断优化产品性能。从早期的原理样机到如今可批量应用的成熟产品,无轴推进器的每一次技术升级都凝聚了团队在动力系统领域的创新探索。目前,相关技术已纳入公司40余项无人系统领域知识产权保护范围,其中多项发明专利为无轴推进器的独特结构与控制方法提供了法律保障,彰显了公司在该领域的技术自主性与竞争力。
极地科考船对推进系统有着极其严苛的要求,而无轴推进器展现出了在低温环境下的独特优势。传统推进器的润滑油在零下数十度的环境中容易凝固,而无轴推进器采用特殊设计的密封电机和耐低温材料,能够在极寒条件下保持稳定运行。某次南极科考中,装备无轴推进器的破冰无人船成功完成了冰层厚度测量任务,其可靠性和低温启动性能得到了充分验证。此外,无轴推进器的模块化设计便于在极端环境下进行快速维修更换,有效降低了极地作业的保障难度。随着极地探索活动的日益频繁,无轴推进器将成为极地科考装备中不可或缺的关键部件。小豚智能通过无轴推进器技术,使无人船在浅水区域的通过性得到明显提升。

无轴推进器的国际合作与技术交流,推动了其技术视野的拓展与应用范围的延伸。通过与海外无人船研发机构的联合测试,无轴推进器在不同国家的水域环境中进行了性能验证,收集到热带海域高盐度、寒带水域低温等特殊条件下的运行数据,为产品全球化适配提供了依据。在国际行业展会中,无轴推进器的技术特点与应用案例引发了关注,促成了与多个国家企业的技术合作项目,推动产品进入国际市场。这种开放的合作姿态,不仅让无轴推进器的技术优势得到更认可,也为公司吸收国际先进经验、提升产品竞争力创造了条件,助力“全球水面无人驾驶”目标的实现。小豚智能开发的无轴推进器支持无线充电技术,明显提升了无人船的持续作业能力。江苏无轴推进器技术参数
小豚智能新研发的无轴推进器采用仿生鳍片设计,大幅提升了水下推进效率与机动性。广东低振动无轴推进器能效提升方案
无轴推进器是一种创新的水下推进装置,其主要设计理念是通过取消传统推进器的机械传动轴,将驱动电机直接集成在推进器内部,从而简化结构并提升能效。与传统推进器相比,无轴推进器采用外转子电机技术,通过电磁力直接驱动螺旋桨旋转,减少了机械传动过程中的能量损耗,同时降低了振动和噪声。这种设计不仅提高了推进效率,还增强了设备的可靠性和耐用性。无轴推进器通常采用密封式结构,能够适应复杂的水下环境,例如高腐蚀性或多泥沙水域,因此在海洋探测、水下机器人等领域具有广泛的应用潜力。此外,其模块化设计便于维护和升级,能够根据不同任务需求灵活调整功率和推力,为水面及水下无人系统提供了更加高效的动力解决方案。广东低振动无轴推进器能效提升方案