三坐标机器人,通常指的是三坐标测量机(CMM,Coordinate Measuring Machine),它是一种用于精确测量物体的位置和形状的仪器,普遍应用于机械制造、汽车制造、航空航天等领域。三坐标机器人的结构主要包括机械系统和电子系统两部分,其工作原理基于坐标测量。三坐标机器人结构组成:机械系统:主要由三个正交的直线运动轴(X、Y、Z轴)组成。常见的结构形式包括移动桥式、固定桥式、立柱式、悬臂式和水平臂式等。每种结构形式都有其特点和适用场景,例如移动桥式结构简单、速度快、精度高,适用于大多数测量任务。电子系统:包括光栅计数系统、测头信号接口和计算机等。光栅计数系统用于测量轴的位移量,测头信号接口负责将测头采集的数据传输给计算机,计算机则负责对数据进行处理和分析。广东明睿智博拣选机械臂采用模块化设计,1小时内可完成不同夹具的快速换型!山西半导体行业智能机器人升级

安全、易用且灵活的协作机器人正成为企业迈向自动化的理想起点。广东明睿智博机器人科技有限公司的协作机器人系列设计以人为本,具备直观的拖动示教或图形化编程功能,让生产线工人也能轻松操作和部署。其内置的高灵敏度力矩传感器和先进的碰撞检测算法,确保在无围栏环境下与人类安全共享工作空间。无论是进行精密电子元件的插装、产品质检、机床看护,还是执行包装、注塑件取出等重复性工作,都能出色完成。广东明睿智博机器人科技有限公司提供丰富的应用套件和接口,方便用户快速适配各种末端工具和应用场景,明显缩短自动化项目的投资回报周期,尤其适合多品种、小批量的柔性化生产模式。山西半导体行业智能机器人升级智能路径规划算法减少误差积累,广东明睿智博适配复杂动态生产环境。
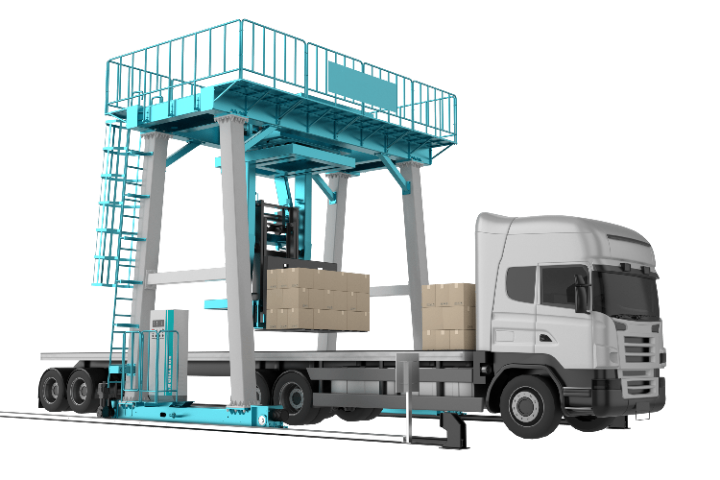
在智能物流与智能制造快速融合的当下,智能装车机器人已成为推动仓储自动化升级的重要力量。该类机器人集成了机器视觉系统、动态路径规划算法及高精度执行机构,能够在多变货物结构和复杂空间环境下完成精确装车作业。广东明睿智博在该领域具备深厚的系统集成能力,结合自主开发的算法控制平台,可根据货物尺寸、堆码规则和车辆舱位智能决策,实现多任务并行作业和动态装载路径优化。智能装车机器人有效解决了人工装车效率低、堆码不稳定以及用工难等痛点,适用于快递、电商、家电、汽配等行业。在高度定制化的场景中,该设备还能与WMS、WCS系统无缝联动,实现从分拣到装车的闭环自动化流程。
智能路径规划算法是机器人实现复杂任务执行、环境适应与多目标调度的关键技术之一,尤其在动态环境下的应用尤为关键。广东明睿智博在路径算法领域进行了深入研究,构建出具备自适应学习能力的动态路径生成引擎。该算法结合地图建模、目标识别、避障判断与任务优先级管理,可在工况变化、障碍物干扰或突发任务插入时,实时修正路径并优化调度顺序。其已广泛应用于拣选机器人、搬运机器人及仓储AGV等设备,明显提升系统响应速度与资源利用率。此外,该路径算法还支持多设备并行调度,通过集中调度平台实现分工,避免重复路径和拥堵现象。广东明睿智博通过持续优化路径规划算法,有效推动了机器人系统在多样化应用场景中的稳定运行与智能决策。三坐标协作机器人在新能源电池组件检测中表现出色,广东明睿智博深入布局新兴制造行业。

广东明睿智博机器人科技有限公司的物流机器人解决方案涵盖AGV/AMR、无人叉车及智能输送分拣系统,致力于打造柔性智能内部物流体系。基于SLAM导航技术(激光/视觉融合),机器人可实现厘米级定位精度和自主路径规划,无缝对接WMS/WCS系统,完成原材料、半成品、成品的自动搬运、存储和分拣。支持潜伏顶升、叉取、辊筒对接等多种移载方式。实际部署案例显示,在大型制造车间或仓储中心,减少人工搬运错误,并实现物流数据的全程可视化追踪。智能路径规划算法减少机器人运行冗余路径,广东明睿智博打造高效运动控制模型。天津SCARA机器人哪家好
智能机器人系统整合视觉、控制、执行模块,广东明睿智博为用户打造高适配性方案。山西半导体行业智能机器人升级
广东明睿智博积极推动协作机器人在工业场景中的安全落地。其协作机器人系列具备力感知避障、拖动示教、人机协同等功能,能与操作人员安全协作,用于螺丝锁付、打磨抛光、测试、搬运等工位。系统通过ISO 10218与ISO/TS 15066国际认证,具备完善的碰撞检测与停止机制。部署简单、无需栅栏、可快速换场,特别适合中小批量、多品种柔性制造需求。公司已在智能家电、医疗设备等行业部署超过300台协作机器人,客户反馈安全性与柔性均表现优异。山西半导体行业智能机器人升级


