- 品牌
- 云乐智能车,杭州云乐,安徽云乐
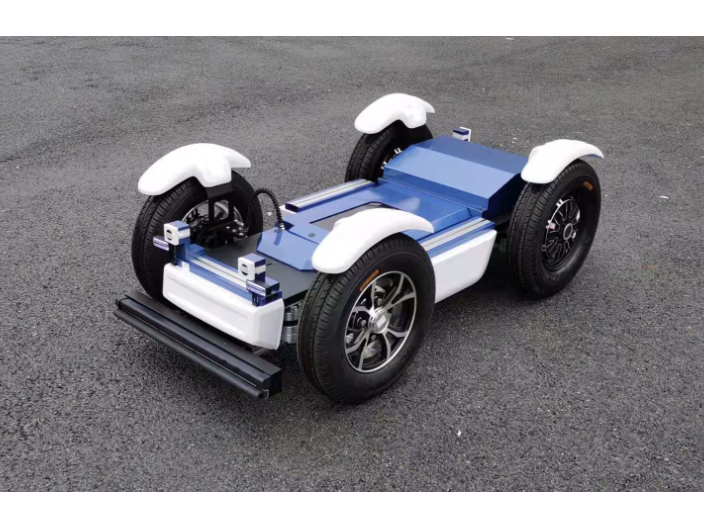
- 型号
- 小蜜蜂
- 尺寸
- 1300*730*540mm
- 重量
- 98kg
- 产地
- 安徽宣城
- 可售卖地
- 全国
- 是否定制
- 否
- 材质
- 铝合金
- 配送方式
- 托运
- 小蜜蜂
- 1300*730*540mm
- 小鱼800
- 920*572*310mm
- 驱动形式
- 后驱前转阿克曼、四驱双转
ROS(机器人操作系统)主要用途是提供一个开源的、灵活的框架,用于开发、部署和管理各种类型的机器人应用程序。ROS旨在解决机器人软件开发中的复杂性和困难,为机器人工程师和研究人员提供了一个强大的工具集,以简化机器人系统的开发过程。ROS的主要用途包括:多机器人系统:ROS支持多机器人系统的开发,允许多个机器人协同工作,共同完成任务,如搜索和救援、探险等。机器人教育和研究:ROS在教育和学术研究中得到广泛应用,为学生和研究人员提供了一个学习和实验的平台,以探索机器人技术的各个方面。工业和服务机器人:ROS也在工业自动化和服务机器人领域中得到普遍使用,用于控制和管理各种类型的机器人,如自动导航车辆、机械臂和无人机。总之,ROS的主要用途是为机器人开发提供一个开放、模块化和强大的框架,以简化复杂的机器人软件开发任务,加速创新,推动机器人技术的发展,并为各种应用领域提供可靠的机器人解决方案。ROS的灵活性和丰富的社区支持使其成为了机器人领域的标准工具之一。Ros系统小车的发展前景怎么样?浙江数字孪生ros厂家直销
ros
要在ROS中配置底盘驱动程序以适应特定底盘的物理特性和运动学参数,首先需要定义和修改底盘的URDF(Unified Robot Description Format)模型,包括底盘的连接、关节、传感器和轮子。在URDF模型中,确保准确描述了底盘的几何形状、关节类型和参数,以及传感器和编码器的位置。然后,通过使用ROS的控制库(例如ros_control),创建或配置底盘控制器,根据底盘的运动学和动力学参数来调整控制器的设置,如PID控制器的增益和反馈环路设置。接着,使用ROS参数服务器来设置控制器的参数,以适应底盘的特定要求,例如极限速度、最大扭矩等。通过ROS启动文件(launch file)来启动底盘驱动程序和控制器,以确保它们正确地与特定底盘硬件集成,实现精确的运动控制。通过这些步骤,可以根据底盘的物理特性和运动学参数,灵活地配置底盘驱动程序,以适应不同类型和规格的底盘。厦门车规级ros厂家直销Ros系统发展需要面临的重要问题有哪些?

ROS包是一种组织和管理ROS项目的方式,它是一个包含了一组相关文件、节点、库、配置和依赖关系的目录结构。每个ROS包通常用于实现特定的机器人功能或组件,例如传感器驱动、导航算法、仿真模型等。ROS包包括一个特定的包描述文件()用于定义包的元信息和依赖项,还包含一个CMakeL文件,用于构建和编译ROS包。这种包的结构使得开发人员能够将机器人软件系统划分为可管理的模块,从而更容易共享、维护和部署机器人应用程序。ROS包是ROS架构中的主要概念,为机器人开发者提供了一种组织和协作的方式,以构建复杂的机器人系统。
要实现差分驱动底盘的简单导航,以便机器人能够避障和自主移动,首先需要确保底盘硬件与ROS兼容,连接里程计传感器以提供位置和速度反馈。然后,使用ROS Navigation Stack,配置导航功能的关键组件,包括局部和全局路径规划器、定位系统(如AMCL)和避障模块。通过ROS话题通信,将传感器数据传输到导航堆栈,使机器人能够感知周围环境。使用全局路径规划器规划机器人从起始位置到目标位置的全局路径,局部路径规划器生成安全的局部运动轨迹。定位系统估计机器人在地图中的位置。使用ROS启动文件(launch file)来启动导航堆栈,监视和调试其性能,确保机器人能够自主导航、避免碰撞并按照预期移动。这样,您可以实现差分驱动底盘的简单导航,使机器人能够在未知环境中自主移动、避开障碍物,适应各种导航任务。ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。

ROS(机器人操作系统)的主要优势在于其开放源代码、灵活性、强大的社区支持和模块化设计,为机器人开发者提供了一种强大的工具,用于简化机器人软件开发的复杂性和提高开发效率。首先,ROS是开放源代码的,这意味着任何人都可以使用、修改和分享它,从而推动了机器人技术的开放创新。其次,ROS提供了丰富的库和工具,包括导航、感知、控制、仿真和仿真等,这些工具加速了机器人应用程序的开发,减少了重复工作。第三,ROS支持分布式计算,允许开发人员将机器人系统划分为多个单个的节点,这些节点可以在不同的计算机上运行,通过通信协议进行交互,从而实现高度可扩展性和灵活性。此外,ROS提供了强大的通信机制,允许节点之间通过话题和服务进行消息传递,实现松耦合的通信,使机器人系统更容易构建和维护。ROS拥有一个庞大的全球社区,社区成员提供了丰富的文档、教程、示例代码和支持,这使得机器人开发者可以轻松获得帮助和资源,加速了机器人技术的发展和应用。综上所述,ROS作为一个开源、灵活和强大的机器人开发框架,具有众多优势,使其成为机器人领域的SHOUXUAN工具,促进了机器人技术的创新和进步。Ros系统无人车多少钱?朝阳区移动机器人ros哪里有
云乐智能车是专业生产无人车(ros导航系统)制造商。浙江数字孪生ros厂家直销
ROS(机器人操作系统)主要支持两种编程语言,即Python和C++,作为其主要编程语言。这两种语言为开发人员提供了多样的选择,以满足不同项目和应用的需求。Python在ROS中常用于快速原型开发和脚本编写,因其简洁和易读性而受欢迎,特别适用于高级任务如数据处理和算法实现。而C++则在需要更高的性能和实时控制的应用中表现出色,如底层硬件控制和运动规划。此外,ROS还支持其他编程语言的集成,通过ROS的多语言支持,开发人员可以使用其他语言如Java、Lua和Octave等,以满足特定项目的需求。这种多语言的灵活性使ROS适用于各种机器人应用,从而推动了机器人技术的多样性和创新。浙江数字孪生ros厂家直销


- 成都带编码器ros应用范围 2024-11-12
- 深圳附近ros生产企业 2024-11-11
- 苏州Apolloros应用范围 2024-11-05
- 厦门智能巡防ros 2024-11-04
- 云南移动机器人ros厂家直销 2024-11-01
- 湖南Apolloros批量定制 2024-10-31
- 海淀区安保巡逻ros方案设计 2024-10-30
- 武汉阿波罗ros 2024-10-28