- 品牌
- 云乐智能车,杭州云乐,安徽云乐
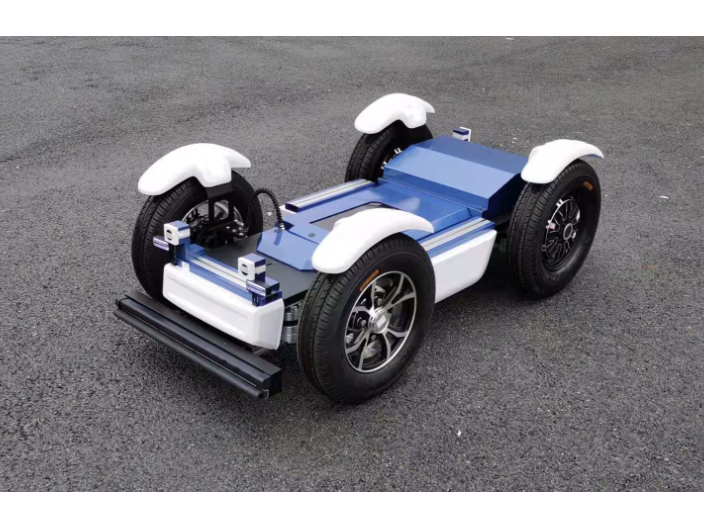
- 型号
- 小蜜蜂
- 尺寸
- 1300*730*540mm
- 重量
- 98kg
- 产地
- 安徽宣城
- 可售卖地
- 全国
- 是否定制
- 否
- 材质
- 铝合金
- 配送方式
- 托运
- 小蜜蜂
- 1300*730*540mm
- 小鱼800
- 920*572*310mm
- 驱动形式
- 后驱前转阿克曼、四驱双转
在ROS中执行SLAM(Simultaneous Localization and Mapping)地图构建需要以下步骤:首先,确保机器人搭载适当的传感器(通常是激光雷达)来感知周围环境。然后,选择一个适用于你的硬件和需求的SLAM算法,如GMapping或Cartographer,安装并配置相应的ROS软件包。接着,创建一个ROS工作空间并将机器人描述模型(通常使用URDF)和SLAM配置文件放入工作空间。在ROS参数服务器中配置传感器参数和SLAM参数。接下来,使用机器人的驱动程序节点获取传感器数据,将其传递给SLAM节点进行处理。运行SLAM节点时,提供初始位姿估计或使用自动初始化。机器人通过移动和传感器数据收集的同时,执行定位和地图构建。保存生成的地图并使用可视化工具如rviz查看地图,完成SLAM地图构建。这使机器人能够在未知环境中进行自主导航和定位,是构建自主移动机器人或智能机器人应用的关键步骤。ROS还支持代码库的联合系统,使得协作亦能被分发。深圳智能巡逻ros解决方案
ros
在ROS(机器人操作系统)中,机器人的感知和控制是通过节点(Nodes)和ROS话题(Topics)的方式进行处理的。感知方面,传感器节点负责读取机器人的传感器数据,如激光雷达、相机和惯性测量单元(IMU)等,然后将这些数据发布到ROS话题上。其他节点可以订阅这些话题,以获取感知数据并进行进一步的处理,例如环境地图构建、障碍物检测和目标跟踪等。控制方面,控制节点可以订阅感知节点发布的数据,计算机器人的运动控制命令,并发布到相应的ROS话题上。运动控制器节点可以订阅这些命令,控制机器人的运动,例如驱动底盘、控制关节或执行其他执行器动作。这种分布式计算和通信模型允许机器人系统中的不同组件单独运行,以实现高度模块化的感知和控制系统,从而使机器人能够感知其环境并根据需要进行响应,实现各种任务和功能,如自主导航、避障、目标跟踪和自动化操作。ROS的通信机制(发布/订阅模型)和节点化的设计使其成为处理机器人感知和控制的强大工具,使机器人系统更加灵活、可扩展和易于开发和维护。河南ros方案设计Ros系统之线控底盘如何改装?

ROS提供了多个包和工具,用于模拟线控底盘的运动和传感器数据,以进行仿真和测试。其中一个常用的工具是Gazebo,它是ROS的仿真环境,允许您创建虚拟世界,包括模拟底盘的运动、传感器数据和物理交互。通过在Gazebo中加载底盘模型和传感器模型,您可以模拟机器人在不同场景中的行为,测试底盘控制算法、导航方案和感知系统的性能,而无需实际硬件。此外,ROS还提供了一些仿真包,如ros_control的Simulated Hardware接口,允许将仿真与底盘控制器集成,实现仿真环境中的运动控制和传感器模拟。这些ROS包和工具为机器人开发人员提供了强大的仿真平台,用于测试和验证底盘的功能和算法,从而节省时间和资源,提高机器人的可靠性和性能。
在ROS中,处理底盘的电源管理和电池状态监测是关键,以确保机器人的连续运行。首先,需要与底盘硬件集成电池电量监测系统,通常通过ROS节点获取电池电量信息。然后,开发ROS节点或使用现有的电源管理工具,以监测电池状态并实时更新电池电量信息。通过发布电池状态的ROS话题,其他节点可以订阅并获取电池电量信息,以根据电池状态进行运动规划和决策。在底盘运动控制中,需要考虑电池电量,以避免过度放电和确保机器人能够安全返回充电站。通过电池状态监测,机器人可以自主决策何时返回充电、充电多长时间,以保持连续运行和任务完成。综合这些功能,ROS提供了灵活的电源管理和电池状态监测解决方案,确保机器人在各种应用中能够可靠地运行。云乐的Ros系统小车的优势在哪里?

工作空间是一个包含功能包、编译包和编译后可执行文件的文件夹,用户可以根据自己的需要创建多个工作空间,在每个工作空间中开发不同用途的功能包。ROS的发展依赖于开源和共享的软件,这些代码由不同的机构共享和发布,比如GitHub源码共享、Ubuntu软件仓库发布、第三方库等。ROS的官方wiki是重要的文档讨论社区,在里面可以很方便地发布与修改相应的文档页面。ROS的answer主页里有大量ROS开发者的提问和回答,对ROS开发中遇到的各种问题的讨论很活跃。ROS 操作方便、功能强大,特别适用于机器人这种多节点多任务的复杂场景。厦门数字孪生ros哪里有
ROS系统的运行逻辑是依据什么?深圳智能巡逻ros解决方案
ROS包是一种组织和管理ROS项目的方式,它是一个包含了一组相关文件、节点、库、配置和依赖关系的目录结构。每个ROS包通常用于实现特定的机器人功能或组件,例如传感器驱动、导航算法、仿真模型等。ROS包包括一个特定的包描述文件()用于定义包的元信息和依赖项,还包含一个CMakeL文件,用于构建和编译ROS包。这种包的结构使得开发人员能够将机器人软件系统划分为可管理的模块,从而更容易共享、维护和部署机器人应用程序。ROS包是ROS架构中的主要概念,为机器人开发者提供了一种组织和协作的方式,以构建复杂的机器人系统。深圳智能巡逻ros解决方案

- 成都带编码器ros应用范围 2024-11-12
- 深圳附近ros生产企业 2024-11-11
- 苏州Apolloros应用范围 2024-11-05
- 厦门智能巡防ros 2024-11-04
- 云南移动机器人ros厂家直销 2024-11-01
- 湖南Apolloros批量定制 2024-10-31
- 海淀区安保巡逻ros方案设计 2024-10-30
- 武汉阿波罗ros 2024-10-28