人工智能相关实验目标识别与分类实验:基于深度学习等人工智能算法,利用机器人的视觉或其他传感器数据,对不同的目标物体进行识别和分类,如识别不同类型的零件、区分不同的交通标志等,提高机器人的智能化水平和自主决策能力。路径规划实验:结合环境感知信息,运用搜索算法和优化算法,为机器人规划出一条从起点...
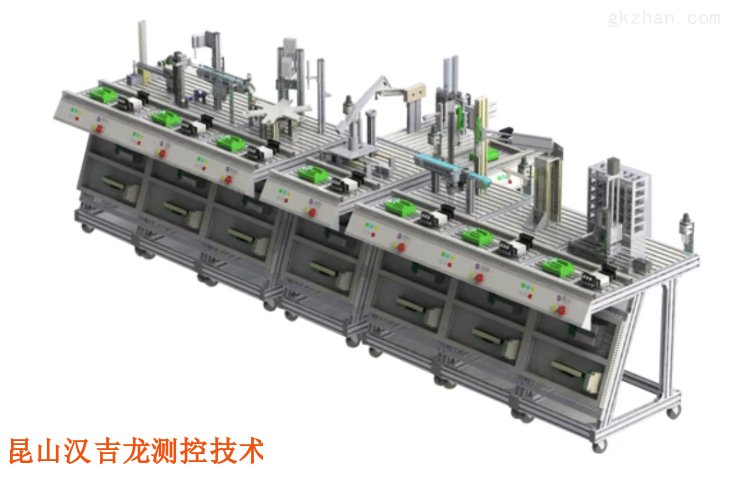
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
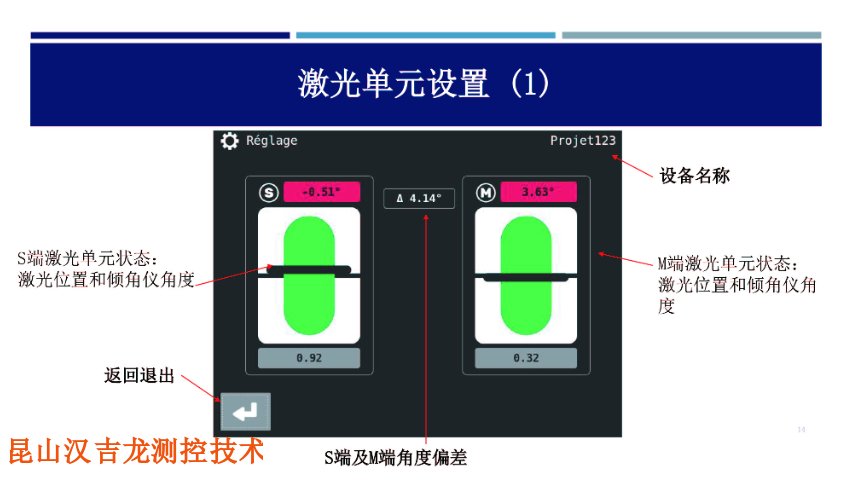
多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。迭代学习操控算法的原理是什么?基于样条曲线的轨迹规划算法有哪些?除了文中提到的算法。实验台能推动机器人技术突破吗?进口自动化智能机器人实验台使用方法

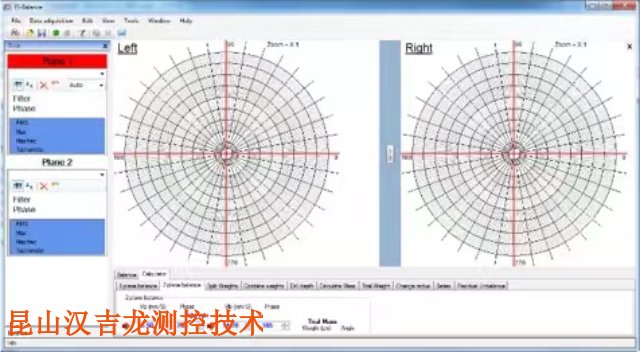
自动化智能机器人实验台通常是可以与不同软件配合的,以下从其与多种软件配合的类型及方式进行介绍:常见可配合的软件类型编程软件:实验台常与C、C++、Python等编程语言的开发软件配合,用于编写机器人的程序,实现各种动作和任务逻辑。如在ROS(机器人操作系统)环境下,常使用Python或C++进行机器人功能的开发。软件:能与V-REP、Webots等机器人软件配合。在这些软件中可构建与实验台相似的虚拟环境,对机器人的运动轨迹、任务规划等进行测试,提前验证算法和程序的可行性,减少在实际实验台上的调试时间。数据分析软件:实验台采集到的数据可传输至MATLAB、Excel等数据分析软件中,进行数据的处理、绘图和统计分析,帮助研究人员了解机器人的性能和实验结果,如分析机器人运动过程中的速度、加速度等数据。建模软件:与SolidWorks、AutoCAD等三维建模软件配合,可根据实验需求为机器人设计和建模新的零部件或工装夹具,然后通过3D打印等技术制造出来并应用于实验台。人工智能软件:与TensorFlow、PyTorch等人工智能框架配合,实现机器人的机器学习和深度学习功能,如让机器人通过图像识别软件进行目标识别和分类任务,提升机器人的智能化水平。 维修自动化智能机器人实验台生产自动化智能机器人实验台可模拟多种工作场景。

依据数据特点数据类型:如果是数值型数据,像传感器采集的温度、压力、速度等数据,可选择数值计算类算法,如均值滤波、卡尔曼滤波用于数据处理,回归分析用于预测。若是图像、视频等非结构化数据,就需要采用如卷积神经网络等专门处理此类数据的算法进行特征提取和分析。数据量:对于少量数据,简单的统计分析算法、基于规则的算法可能就足够,如通过设定阈值判断机器人状态是否异常。当数据量庞大时,像深度学习算法中的循环神经网络(RNN)及其变体LSTM等,能利用大量数据进行训练学习,挖掘数据中的复杂模式和规律。数据噪声:若数据噪声较大,需要先采用滤波算法进行去噪,如中值滤波、小波滤波等。对于存在随机噪声且具有动态特性的数据,卡尔曼滤波能滤除噪声,实现对机器人状态的准确估计。
自动化智能机器人实验台参考算法性能与可解释性算法性能:通过在实验台上进行算法测试,比较不同算法在准确性、精度、召回率等指标上的表现。例如在故障诊断任务中,对比神经网络算法和支持向量机算法的故障识别准确率和误报率,选择性能更优的算法。可解释性:在一些对解释性要求较高的场景,如工业生产中的关键机器人系统,需要选择可解释性强的算法,如基于规则的算法、决策树算法,以便工程师理解和解释算法的决策过程,迅速问题和进行系统优化。而对于一些对可解释性要求不高,只追求性能的场景,如某些智能安防机器人的图像识别任务,深度学习算法虽然可解释性差,但性能优越,也可被选用。结合过往经验与行业标准经验借鉴:参考相关领域的研究成果和实践经验,了解其他类似机器人实验台所采用的数据分析算法。比如在物流机器人领域,若已有成功案例采用了某种特定算法进行路径规划和优化,可考虑借鉴并根据自身实验台特点进行改进。行业标准:某些行业对机器人的数据分析有特定的标准和规范要求,例如汽车制造行业中机器人的质量检测和,需要遵循相关的行业标准和规范,选择符合标准的算法进行数据分析,确保机器人的性能和质量符合行业要求。 如何提升自动化智能机器人实验台的性能呢?
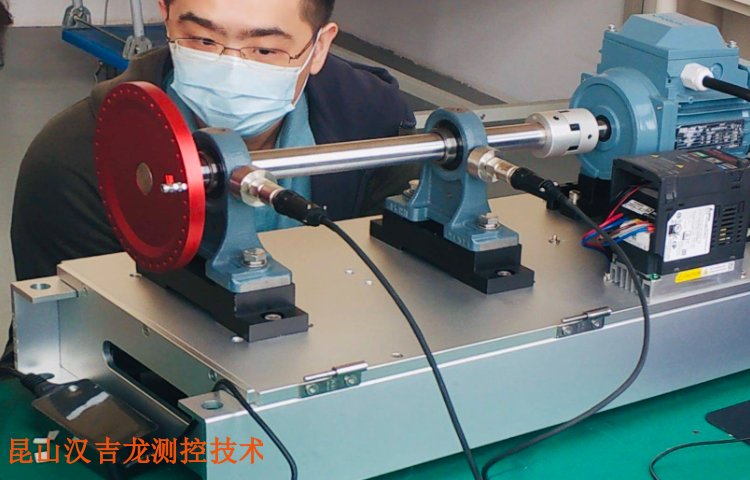
精密机械部件:包括高精度的机械臂、关节、导轨、电机、减速器等,以确保机器人的精确运动和操作。一个高精度的机械臂可能就需要几十万元。其他辅助设备:还需要电源系统、通信模块、数据存储设备等,以及为保证实验台稳定运行的配套设备,如柜、操作台等,这些硬件设备的成本也不容小觑。软件成本操作系统和开发工具:可能需要购买实时操作系统、机器人开发框架以及各种软件工具,如ROS(机器人操作系统)等,部分商业软件需要支付高额的授权费用。算法研发和优化:开发复杂的路径规划算法、运动算法、人工智能算法等需要大量的时间和精力,可能还需要购买相关的算法库或模型,增加了软件研发成本。软件测试和维护:为确保软件的稳定性和可靠性,需要进行大量的测试和后续维护工作,这也会产生持续的费用。 自动化智能机器人实验台如何实现多种机器人的协同作业?产线自动化智能机器人实验台设备
实验台能为机器人创新供平台吗?进口自动化智能机器人实验台使用方法
功能与性能问题功能不匹配:软件的功能与实验台的实际需求不匹配,无法充分发挥实验台的性能。例如,软件没有提供实验台所需的特定运动操控功能,或者软件的操控逻辑与实验台的硬件结构不匹配,导致机器人无法完成预期任务。性能瓶颈:软件的算法复杂度较高,而实验台的硬件性能有限,会导致软件运行缓慢,影响机器人的实时操控和响应速度。比如在进行复杂的路径规划算法计算时,实验台的处理器性能不足,使得机器人的路径规划时间过长,无法满足实时应用的要求。实时性要求***:有些软件需要实时获取实验台的数据并进行处理,而实验台可能无法满足如此高的实时性要求。例如,在机器人的高速运动操控中,软件需要以极高的频率获取传感器数据来调整运动姿态,但实验台的数据采集和传输速度有限,无法满足软件的实时性需求,导致机器人运动操控精度下降。进口自动化智能机器人实验台使用方法
与自动化智能机器人实验台相关的文章

气动系统自动化智能机器人实验台现状
- 进口自动化智能机器人实验台使用方法 2025-02-16
- 多功能自动化智能机器人实验台定做 2025-02-14
- 多功能自动化智能机器人实验台特点 2025-02-12
与自动化智能机器人实验台相关的产品
与自动化智能机器人实验台相关的新闻
与自动化智能机器人实验台相关的问题
与自动化智能机器人实验台相关的标签
新闻资讯
产品推荐
-

江苏三合一轴找正仪
2026-07-03 -

汉吉龙百分表对中仪图片
2026-07-02 -

瑞典轴对中激光仪技术参数
2026-07-02 -
轴承现场动平衡服务检测怎么做
2026-07-01 -

耦合泵轴热补偿对中仪贴牌
2026-07-01 -
高频现场动平衡服务检测企业
2026-06-30 -
激光激光对中服务视频
2026-06-30 -

送风机疏水阀故障检测服务方法
2026-06-29 -

压缩机疏水阀故障检测服务方案
2026-06-29