-
山西室内轮式升降巡检机器人安全避障的组成
继电室作为电力系统的重要环节,对设备运行安全有较高要求。继电室室内轮式升降巡检机器人由多个功能模块组成,构建了一个集成化的智能巡检平台。主要硬件包括红外热像仪和高清可见光摄像机,用以捕捉设备表面温度和视觉信息,辅助故障分析。局放检测传感器用于实时监测局部放电,预防电气设备绝缘问题。环境监测模块整合温湿度和气体传感器,持续跟踪继电室内环境变...
查看详细 >>07 2026-07 -
江苏工业安全监测系统煤场自动寻检
燃料系统的安全巡检在发电厂及燃煤电厂的日常运行中承担着关键职责。燃料系统安全巡检机器人配备了多种传感器,如温湿度检测、有毒气体监测和高清摄像头,能够持续采集燃料输送设备及周边环境的多维数据。机器人具备全天候自主巡检能力,能够定期获取设备外观、红外热像、气体浓度及噪声水平等信息,协助及时识别设备异常和潜在风险。通过数据传输至云端平台,结合大...
查看详细 >>04 2026-07 -
河北工业安全监测系统煤场实时数据采集
在大型燃煤电厂和发电集团的料场管理中,堆取料机的安全运行是保障物料输送高效且无事故的关键环节。想象一个典型的燃煤料场,堆取料机在不停地堆积和取料,煤堆因长时间堆积容易发生氧化自燃,粉尘浓度和有害气体的积聚也对环境和设备安全构成威胁。此时,工业安全监测系统通过布置在料场的红外热像摄像机和多种传感器,能够全天候监控煤堆的温度变化、粉尘浓度以及...
查看详细 >>01 2026-07 -
浙江堆取料机无人值守系统自动化控制台
大型料场堆取料机无人值守系统由两个关键组成部分构成:堆取料机信息采集系统和中控室控制系统。信息采集系统整合了激光扫描检测、工业视频监控、GPS定位及编码定位装置,协同捕捉料堆的三维形态及设备姿态,提供对周边环境的监测。激光扫描仪安装于堆料机门架或悬臂,采用扇形扫描方式,动态反映料堆变化,辅助精确作业。料位检测通过雷达传感器实时测量设备与物...
查看详细 >>28 2026-06 -
海南工业安全监测系统煤炭转运
在煤矿生产和火电厂的日常运营中,温度监测是确保设备安全运行的重要环节。挡煤墙罐壁温度工业安全监测系统通过智能化的传感器技术,为企业提供了实时的温度数据采集和分析功能。该系统能够自动生成详细的报表,为管理层提供可靠的数据支持。这种自动化的监测系统不*提高了工作效率,还有效降低了安全隐患。通过实时监测和数据分析,企业能够及时发现潜在的温度异常...
查看详细 >>25 2026-06 -
高灵敏度在线监测工业安全监测系统
在大型料场中,工业安全监测系统的工作原理主要依赖于多种传感器的综合应用。这些传感器被 安装在料场的关键位置,用于监测温度、气体浓度以及粉尘等环境因素。系统通过无线网络将采集到的数据传输至监控室,便于管理人员实时查看和分析。红外热成像技术是其中的一项主要技术,它能够在不接触物体的情况下,准确测量物体表面的温度变化。这对于防止煤堆自燃等潜在...
查看详细 >>22 2026-06 -
陕西工业安全监测系统气体泄漏软件
输煤集控室的运行状态通过安全监测系统与整个生产流程紧密相连,其数据的准确性与及时性直接影响着生产的稳定与连续。工业安全监测系统通过先进的传感器和监测设备,实现了输煤集控室内的实时数据采集。该系统能够精确捕捉环境中的变化,包括有毒气体浓度、粉尘水平和温度动态,为操作人员提供了安全监测视图。实时数据采集不*提高了监测的准确性,还为企业的安全管...
查看详细 >>19 2026-06 -
江苏数字煤场管控系统作业安全的优点
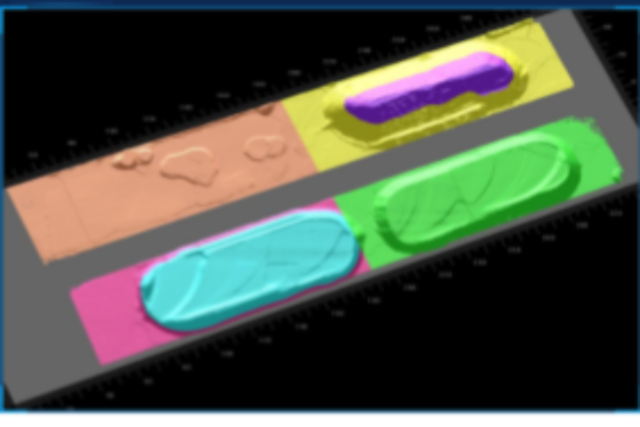
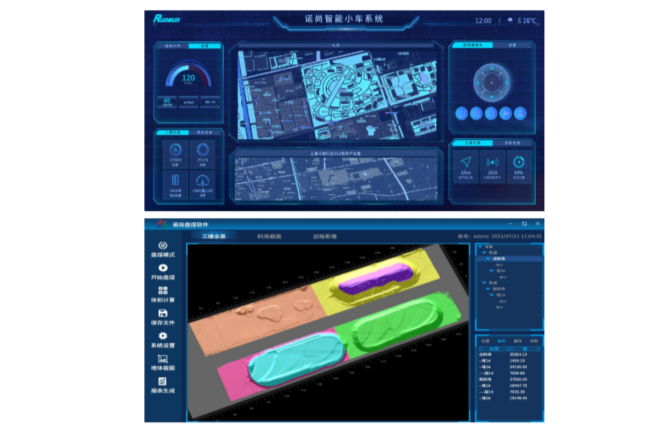
数字煤场管控系统由若干关键模块组成,各模块承担不同职能,协同促进煤场管理的智能化进程。系统关键部分包括三维激光盘煤系统、料场安全监测系统、数字化无人值守系统以及智能巡检系统。三维激光盘煤系统利用激光扫描技术,实时测量煤堆的体积与形态,确保盘点数据的准确及时。料场安全监测系统负责环境参数的监控,涵盖温度、粉尘和有害气体指标,保障煤场安全。数...
查看详细 >>16 2026-06 -
福建室内轮式升降巡检机器人热像测温
红外测温技术是电气房轨道巡检机器人中关键的技术指标之一,直接关系到设备预警和安全管理。机器人搭载的高灵敏度红外热像仪能够实时捕捉设备表面温度分布,精确定位异常热点。该测温模块具备较高的温度分辨率和测量精度,适合110kV及以上电压等级的复杂环境。多点温度采集配合智能算法实现自动报警,当温度超过设定阈值时,系统会触发警报并将异常数据上传至监...
查看详细 >>13 2026-06 -
自动监测报价工业安全监测系统
对于使用斗轮机的企业而言,工业安全监测系统供应商的选择直接影响着设备运行风险和安全管理水平。供应商应能够提供精确的监测数据、快速的故障响应和稳定的系统支持,这些都是保障堆取料作业安全、防范自燃和坍塌事故的基础。斗轮机作为大型机械设备,其运行环境复杂,安全监测系统需要具备实时监控和预警能力,以应对可能的安全隐患。通过先进的传感器和监测设备,...
查看详细 >>10 2026-06 -
北京室内轮式升降巡检机器人智能仪表识别怎么样
气体盘煤巡检机器人系统以多传感器集成为基础,专门设计用于煤场环境中有害气体的监测与分析。该系统包括气体传感器模块,能够检测二氧化碳、六氟化硫等多种气体的浓度,配合温湿度传感器,实现对环境参数的动态感知。视觉设备如高清摄像头和红外热像仪为气体异常定位提供辅助支持。定位装置和无线通信模块保障机器人在轨道上的精确移动及数据的实时传输。伺服电机驱...
查看详细 >>07 2026-06 -
河南工业安全监测系统烟雾浓度操作方法
事故记录廊道巡检机器人针对输煤廊道等关键区域的安全监测进行了专门设计,缓解了人工巡检覆盖不足及高风险作业的难题。设备配备高清摄像头和多种传感器,能够实时采集粉尘浓度、温度及异常声响等环境信息,结合后台大数据分析,实现对输煤廊道运行状态的动态监控。机器人能够识别皮带跑偏、设备温度异常以及管道损坏等潜在风险,并自动发出报警信号,便于维护人员及...
查看详细 >>04 2026-06