企业商机
首页 > 企业商机
首页 > 企业商机
我们的定制视觉检测服务,以客户需求为中心,提供个性化解决方案。从需求调研到方案落地,客户需求始终是我们的导向。需求调研阶段,采用 “一对一” 访谈模式,不了解客户明确提出的检测要求,还会挖掘潜在需求,...

定制机器视觉检测服务能够实现与机器人技术的无缝集成,打造“视觉+机器人”的智能化生产解决方案,进一步提升生产自动化水平。在工业生产中,将定制机器视觉检测系统与工业机器人结合,可实现产品的自动抓取、自动...

瑕疵检测系统在锂电池极片生产中的应用,是保障锂电池极片质量的关键,直接影响锂电池的容量与安全性能。锂电池极片的漏涂、褶皱、断栅、毛刺、厚度不均等瑕疵,会导致电芯内部短路、容量衰减,甚至引发热失控风险,...

新能源行业对产品安全性与寿命的追求,使得瑕疵检测系统成为锂电池、光伏组件生产中不可或缺的环节。在锂电池制造中,极片的褶皱、漏涂、断栅,电芯的内部短路、鼓包,电池包的装配错位等瑕疵,都可能引发热失控等严...

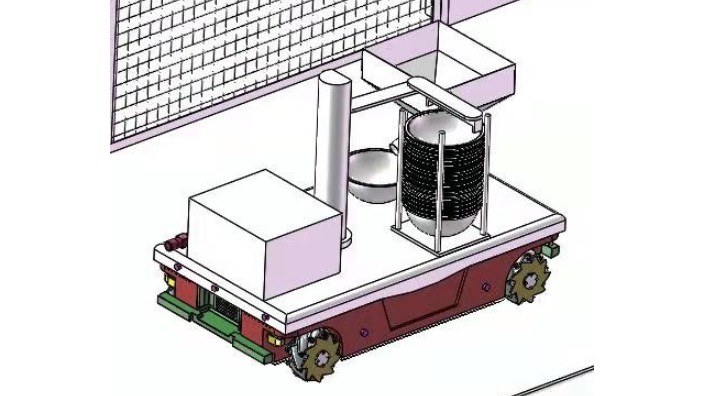
规划技术决定了采摘机器人的作业效率与安全性,主要分为移动路径规划和机械臂作业路径规划两大类,让机器人“走更好的路”“做更好的操作”。移动路径规划主要针对移动底盘,目标是在复杂的农田或果园环境中,规划出...

在金属加工行业,瑕疵检测系统的应用有效提升金属产品的表面质量与机械性能,降低生产损耗。金属材料如冷轧钢板、铝合金型材、精密机械零件等,其表面的氧化斑点、划痕、裂纹、麻点、毛刺等瑕疵,会影响产品的外观、...

丘陵山地采摘机器人是专为山地果园设计的设备,针对丘陵山地地形崎岖、交通不便、人工采摘难度大、安全性低的特点,采用轻量化、抗颠簸的设计理念,实现山地果园的自动化采摘。我国丘陵山区占国土面积近70%,产出...

瑕疵检测系统在管材、型材生产中的应用,实现了长尺寸产品的在线连续检测,有效提升管材、型材的质量稳定性。管材、型材如塑料管材、金属管材、铝合金型材、塑钢型材等,其表面的划痕、裂纹、凹陷、凸起、壁厚不均等...
在陶瓷制品生产中,瑕疵检测系统的应用提升了陶瓷制品的外观品质与合格率,适用于瓷砖、陶瓷器皿、陶瓷零部件等各类陶瓷产品。陶瓷制品的表面划痕、崩边、色差、裂纹、杂质等瑕疵,会影响产品的外观品相与机械强度,...

瑕疵检测系统为企业提供了全流程、可追溯的质量管控体系,是实现数字化工厂转型的关键数据入口。系统在完成检测的同时,会自动记录每一件产品的检测结果、瑕疵类型、位置坐标、时间戳等海量数据,并上传至云端数据库...

在医疗器械生产中,瑕疵检测系统的应用严格保障医疗器械的精度与安全性,适用于手术器械、植入式医疗器械、医疗仪器零部件等各类医疗器械。医疗器械对精度、洁净度要求极高,其表面的划痕、锈蚀、变形、异物混入、尺...

成本控制与投资回报率(ROI)分析,是企业决定是否部署瑕疵检测系统的重要考量。系统的初期投入包括硬件采购、软件开发、集成调试等,成本较高。对于中小企业而言,如何以合理的成本实现**质检功能,是关键问题...

瑕疵检测系统在汽车玻璃生产中的应用,严格保障汽车玻璃的安全性与外观品质,适配前挡风玻璃、侧窗玻璃、后挡风玻璃等各类汽车玻璃。汽车玻璃的划痕、崩边、气泡、结石、裂纹等瑕疵,会影响玻璃的强度与透光性,存在...

瑕疵检测系统在橡胶制品生产中的应用,有效解决了橡胶制品瑕疵影响性能与使用寿命的问题,适用于轮胎、密封圈、橡胶软管等各类橡胶产品。橡胶制品的表面划痕、破损、气泡、杂质、色差、尺寸偏差等瑕疵,会影响产品的...
新能源行业对产品安全性与寿命的追求,使得瑕疵检测系统成为锂电池、光伏组件生产中不可或缺的环节。在锂电池制造中,极片的褶皱、漏涂、断栅,电芯的内部短路、鼓包,电池包的装配错位等瑕疵,都可能引发热失控等严...
边缘计算与云计算的协同架构,是瑕疵检测系统应对大规模、分布式生产场景的必然趋势。在生产现场,边缘计算节点负责实时处理图像数据,保证检测的低延迟与高可靠性,快速执行不良品剔除等操作。同时,边缘节点将关键...

在一些生产场景中,产品处于高速运动状态,对其进行实时高精度检测具有很大的难度。熙岳智能为满足这一特殊需求,在视觉检测设备上搭载了高速相机。该高速相机具有极高的帧率和分辨率,能够在极短的时间内捕捉到运动...
无论您的产品有多复杂,我们都能提供定制化的视觉检测方案。不同行业的产品有着截然不同的结构与检测需求,有些产品可能包含多层嵌套组件,有些则具备异形外观或特殊功能区域,传统通用检测方案往往难以适配。而我们...
为确保瑕疵检测系统在数年生命周期内持续稳定运行,建立完善的维护与校准制度至关重要。日常维护包括清洁光学部件(镜头、保护镜、光源)表面的灰尘和油污,检查机械安装的紧固性,备份系统参数和程序。定期校准则是...
无论您的产品处于哪个生产阶段,我们都能提供定制化的视觉检测。产品生产涵盖原材料入库、半成品加工、成品出厂等多个阶段,每个阶段的检测重点各不相同。原材料阶段,我们可定制材质识别与杂质检测方案,杜绝不合格...

草莓采摘机器人是专为浆果类作物设计的采摘设备,针对草莓果实柔软、易破损、生长密集、易被叶片遮挡的特点,采用轻量化、高精度的设计理念,实现草莓的精细、无损采摘。草莓多种植在温室大棚内,作业空间有限,因此...
草莓采摘机器人是专为浆果类作物设计的采摘设备,针对草莓果实柔软、易破损、生长密集、易被叶片遮挡的特点,采用轻量化、高精度的设计理念,实现草莓的精细、无损采摘。草莓多种植在温室大棚内,作业空间有限,因此...

苹果智能采摘机器人将成为农业物联网体系的重要终端,通过数据闭环实现 “监测 - 预判 - 调度 - 分析” 的全流程智慧管理。机器人搭载的温湿度传感器、土壤墒情传感器、果实生长传感器,可实时采集果园环...

草莓采摘机器人专为温室大棚密集种植场景设计,聚焦果实柔软易损、生长密集、叶片遮挡严重的难点,采用 “小型化底盘 + 柔性执行器 + 智能避障” 的轻量化架构。其视觉系统搭载 YOLOv8s/YOLOv...

小型化采摘机器人主要针对温室大棚、盆栽作物、小型果园等场景设计,具有体积小、重量轻、灵活性强的特点,能够适应狭小的作业空间,避免碾压作物,适用于草莓、番茄、盆栽水果等作物的采摘。小型化采摘机器人的移动...
采摘机器人的视觉识别系统主要由高清相机、镜头、图像采集卡、图像处理模块四部分组成,能够完成果实的识别、定位、成熟度判断等任务,相当于机器人的“眼睛”。高清相机负责采集作业环境和果实的图像信息,镜头可根...

采摘机器人的移动底盘是其实现自主作业的基础,根据作业场景的不同,主要分为轮式、履带式、轨道式三大类,各自具备不同的优势,适配不同的种植环境。轮式底盘结构简单、移动速度快、能耗低,适用于平坦的平原果园、...
多机器人协同作业是采摘机器人的重要发展方向,通过多台采摘机器人、转运机器人、分拣机器人的协同配合,构建完整的自动化采摘生产线,大幅提升采摘、分拣、转运的整体效率,适用于大规模果园和蔬菜种植基地。多机器...

小型化采摘机器人主要针对温室大棚、盆栽作物、小型果园等场景设计,具有体积小、重量轻、灵活性强的特点,能够适应狭小的作业空间,避免碾压作物,适用于草莓、番茄、盆栽水果等作物的采摘。小型化采摘机器人的移动...
专业的定制视觉检测,为您的企业提供品质优化。我们并非简单交付一套检测设备,而是以 “提升企业品质水平” 为目标,提供全周期的品质优化服务。在服务初期,通过对企业现有生产流程与品质痛点的调研,设计能解决...
2026.05.04 北京草莓智能采摘机器人技术参数
2026.05.04 吉林水果智能采摘机器人供应商
2026.05.03 江西定制机器视觉检测服务私人定做
2026.05.03 山东密封盖定制机器视觉检测服务供应商
2026.05.02 福建定制机器视觉检测服务产品介绍
2026.05.02 吉林智能定制机器视觉检测服务价格低
2026.05.01 江西定制机器视觉检测服务技术参数
2026.05.01 吉林电池定制机器视觉检测服务优势
2026.04.30 扬州电池片阵列排布瑕疵检测系统按需定制
2026.04.30 盐城传送带跑偏瑕疵检测系统服务价格
2026.04.29 安徽铅板瑕疵检测系统产品介绍
2026.04.29 广东传送带跑偏定制机器视觉检测服务供应商
2026.04.28 南京铅酸电池瑕疵检测系统制造价格
2026.04.28 零件视觉检测系统
2026.04.27 浙江品质智能采摘机器人供应商
2026.04.27 连云港电池瑕疵检测系统售价
2026.04.26 江西一种智能采摘机器人品牌
2026.04.26 杭州电池片阵列排布瑕疵检测系统功能
2026.04.25 吉林什么是智能采摘机器人
2026.04.25 福建农业智能采摘机器人定制价格