- 品牌
- 斯柯拉
- 设备所在地
- 安徽,南京,镇江,马鞍山,滁州,芜湖,常州,扬州
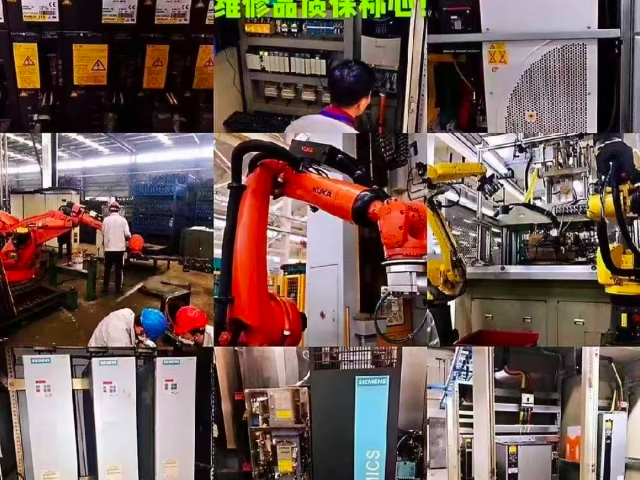
IGBT 驱动死区时间(通常 2–5μs)是驱动板关键隐性参数,直接决定模块寿命。维修中常遇 “换模块即炸”,根源多为驱动光耦(如 TLP250/PC923)输出延迟漂移≥0.3μs,或图腾柱三极管饱和压降不均,导致上下桥臂微秒级重叠导通。修复需用 100MHz 示波器捕获驱动脉冲:测 Vgs 上升沿 / 下降沿斜率(正常≥1V/ns)、死区窗口宽度,若延迟超标,更换同批次光耦并校准驱动电阻(通常 15–47Ω,误差≤±5%);同时检查隔离变压器漏感,漏感>5μH 需重绕或更换,避免共模干扰拉偏时序。此方法可杜绝 90%“盲换模块” 二次损坏,属行业内不传的时序校准工艺。换轴承别硬敲,用热套法慢慢套,保证轴和轴承的配合间隙,不然轴会弯。机器人维修检测

BGA 芯片虚焊(球裂、脱焊、冷焊)是高密度电路板的高频故障,常规万用表无法检测,X 射线设备成本高且普及率低,因此非 X 射线检测法成为维修关键。主要方法包含:①温度梯度法:用热风枪从芯片底部缓慢加热(120℃→180℃),同时用示波器监测关键信号(时钟、复位、数据总线),信号恢复则为虚焊;②边缘振动法:用绝缘橡胶棒轻敲芯片四角与中心,观察故障是否出现 / 消失,虚焊球在振动下会短暂断开;③电容耦合探测法:用万用表交流档,黑笔接地、红笔轻触 BGA 边缘过孔,虚焊区域会出现不稳定的交流电压波动(10–100mV);④助焊剂渗透法:在芯片边缘涂少量低固含量助焊剂,加热后观察是否有气泡从焊点缝隙冒出(气泡为虚焊间隙内空气受热膨胀)。这些方法准确率可达 85% 以上,无需专用设备,适合现场快速定位,后续可通过植球重焊彻底修复,避免因漏检导致的反复故障。伺服驱动维修联系方式变压器大修后,需做感应耐压试验,频率 100–200Hz,可检出局部绝缘薄弱点。
无图纸维修的关键不是 “猜”,而是基于典型电路拓扑的建模与推理,把未知电路板拆解为已知功能模块,快速建立等效电路模型。建模步骤:①模块划分:根据元件分布与接口位置,划分电源、时钟、复位、驱动、接口、保护等功能区域;②拓扑匹配:电源区匹配开关电源 / 线性稳压拓扑、时钟区匹配晶振 + 起振电容拓扑、驱动区匹配三极管 / MOS 管放大拓扑、接口区匹配差分 / 单端通讯拓扑;③信号流向推理:从电源输入→稳压→主要芯片供电→时钟 / 复位→信号处理→驱动输出→接口,理清信号路径,定位断点;④对称与复用:利用电路板的对称性(如多通道接口、重复驱动电路),对比正常与异常区域差异;⑤元件参数反推:根据元件型号、封装、周边元件参数,反推电路功能与工作点(如电阻分压比、电容滤波频率)。建模思维能让维修者在无图纸时 “胸有成图”,避免盲目测量,将定位效率提升 50% 以上。实操中需积累典型电路拓扑库(如 Buck/Boost 电源、运放放大、三极管开关),遇到未知电路时快速匹配建模。
数字电路逻辑错误(功能异常、时序错误、总线互扰、译码错误)表现为输出状态错误、数据错乱、设备无响应,排查需从 “供电→时钟→复位→逻辑单元→总线→负载” 逐级验证,结合真值表与时序图分析。关键排查逻辑:①供电完整性:测数字 IC 供电引脚电压(3.3V/5V),偏差≤±5%,纹波 < 100mV,供电异常会导致逻辑状态不稳定;②时钟质量:示波器测时钟信号(频率、占空比、上升沿),正常为标准方波,无抖动、无畸变,时钟异常会导致时序错误;③复位有效性:测复位信号电平与时序,确保上电复位、手动复位正常,复位异常会导致 IC 初始状态错误;④逻辑单元验证:对门电路、触发器、译码器,输入激励信号(高低电平),测量输出是否符合真值表,异常则为逻辑单元损坏;⑤总线状态:测地址线、数据线、控制线电平,无互扰、无悬空(悬空会导致逻辑混乱),总线异常多为驱动能力不足或短路;⑥负载匹配:检查输出端负载是否过重,超出 IC 驱动能力会导致输出电平异常。数字电路逻辑错误排查需结合图纸与真值表,逐级隔离,避免盲目更换芯片,提高定位效率。QFN 底部虚焊用常规 X 光难检出,侧视红外热成像能捕捉微区温差异常。
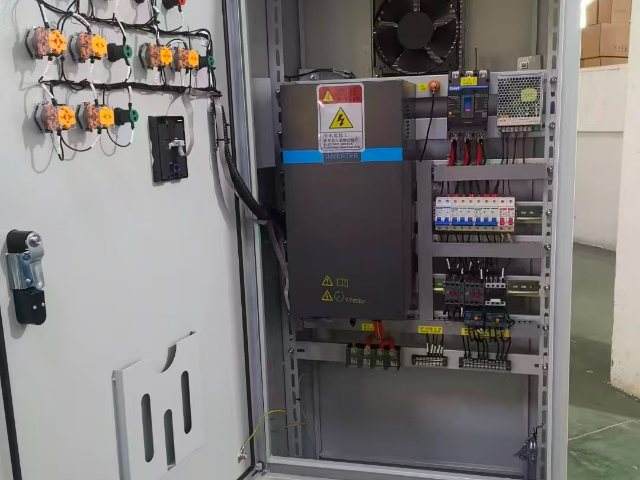
变频器过压(OU)、欠压(LU)误报,多因直流母线电压采样分压电阻(100kΩ~1MΩ)漂移,而非母线电压异常。分压电阻长期受高温、高压影响,阻值会缓慢漂移,导致采样电压偏差超 5%。检测方法:1)用万用表测量母线实际电压,与面板显示值对比,偏差超 10V 时判定电阻漂移;2)拆下分压电阻,用 LCR 表测量,阻值偏差超 ±2% 需更换。修复时需选用高精度金属膜电阻(精度 ±0.1%),并同步更换同组分压电阻,确保比值不变。更换后需进入参数设置界面,重新校准电压采样值,使面板显示与实际电压误差<1V。某光伏逆变案例中,分压电阻漂移导致 OU 频繁误报,校准后故障消除,母线电压控制精度提升至 ±0.5%。伺服抱闸失灵多为线圈烧损或机械卡滞,需测电阻并拆解清理。芜湖机器人维修电话
气体继电器误动,排查接线端子氧化,用细砂纸打磨后涂导电膏,比直接紧固更可靠。机器人维修检测
轴承是伺服电机故障率比较高的易损部件,直接影响振动、噪音与运行精度。典型故障表现为运行异响、轴向窜动、径向跳动、发热严重,多由润滑劣化、粉尘侵入、安装偏心、冲击负载导致。检修时用百分表测量径向游隙,超过0.03mm或窜动超0.05mm需及时更换。拆装严禁直接敲击轴承内圈,宜采用热套法安装,温度把控在80℃以内。装配后加注适配低温升高速润滑脂,把控填量为轴承腔1/3–1/2。同时检查轴伸、键槽、端盖与联轴器对中,校正同轴度与垂直度。机械修复完成后做空载试运行,监测噪音、温度与振动值,维持长期稳定运转。机器人维修检测
南京斯柯拉电气科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的电工电气中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同南京斯柯拉电气科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!

预见性维修是延长西门子变频器使用寿命的关键,可明显降低突发故障概率,关键在于定期检测老化元件、清理内部积尘、优化运行环境。首先制定定期保养计划,每6-12个月进行一次系统性检修,断电后用压缩空气清理散热风扇、散热片、电路板上的灰尘,灰尘堆积会导致散热不良、绝缘下降,引发过热、短路故障。重点检测易老化元件,散热风扇长期运行易出现转速变慢、异响,风扇故障会直接导致功率模块过热报警,需定期更换;继电器、接触器触点易氧化烧蚀,检测触点接触电阻,若阻值过大及时更换;接线端子长期受热受力易松动氧化,重新紧固并打磨触点,确保连接良好。针对运行超过5年的变频器,提前更换电解电容、风扇、继电器等易损件,避免元件...
- 镇江触摸屏维修哪家好 2026-05-13
- 扬州PLC维修怎么收费 2026-05-12
- 常州人机界面维修检测 2026-05-12
- 滁州实验室仪器维修 2026-05-11
- 实验室仪器维修参考价格 2026-05-10
- 扬州变频器维修价格多少 2026-05-09
- 常州PLC维修联系方式 2026-05-08
- 芜湖PLC维修怎么收费 2026-05-07
- 芜湖伺服驱动维修参考价格 2026-05-06
- 常州PLC维修 2026-05-05

- 南京实验室仪器维修大概费用 2026-04-30
- 触摸屏维修修理 2026-04-29
- 扬州PLC维修检测 2026-04-28
- 常州PLC维修哪家便宜 2026-04-27
- 马鞍山实验室仪器维修价格合理 2026-04-26
- 扬州机器人维修联系方式 2026-04-25



- 实验室仪器维修参考价格 05-10
- 扬州变频器维修价格多少 05-09
- 常州PLC维修联系方式 05-08
- 芜湖PLC维修怎么收费 05-07
- 芜湖伺服驱动维修参考价格 05-06
- 常州PLC维修 05-05
- 机器人维修检测 05-04
- 常州维修 05-03
- 马鞍山人机界面维修修理 05-02
- 芜湖触摸屏维修大概费用 05-01