国自机器人获评首台(套)项目一览,2014:变电站KYN开关柜智能操控机器人2015:基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!我们是可以根据您的需求,为您量身定制光伏智能清扫机器人,满足您的个性化需求。浙江智能清洗机器人报价表

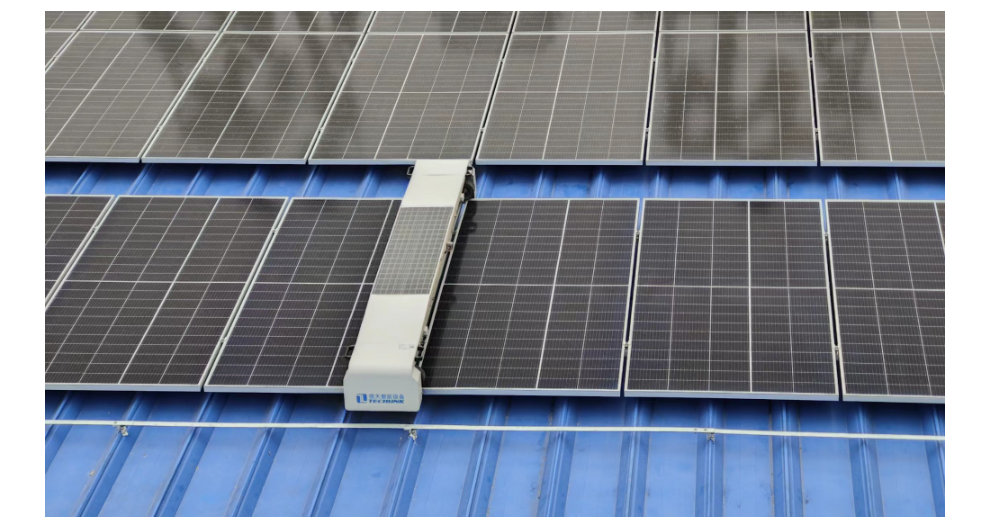
辊刷拼接设计,易于组装和维护!自适应倾斜行走驱动装置可轻松应对光伏组件阵列从上到下、从左到右、从前到后的变化;光伏组件的框架用作轨道,无需铺设轨道,成本低,便于现场安装和施工。自适应跟踪装置**提高了光伏组件阵列桥接的施工效率,缩短了施工周期;电控系统抗干扰能力强,耐高低温,可靠性和稳定性好;**控制实现所有清洁机器人的智能调度;这是目前理想的光伏组件清洁方案;机器人清洁效率是人工清洁的3-5倍、成本低(*为手动清洁成本的30%-50%)等诸多优点!湖南光伏清扫机器人厂家这种机器人具备多种传感器,如视觉传感器,红外传感器等,可实时感知周围环境。

光伏组件自动除尘一般根据季节和地区而定,有些地区空气质量不好,容易积灰,就要每个月进行清理一次,有些地方好一些,可以2个月清理一次。另外,光伏板本身安装的时候具有一定的倾斜度,有一定的自清洁能力的。清理过程主要有三个步骤:1、先用软布或鸡毛掸子清理组件表面浮尘,2、而后用水小心清洗组件表面,3、***用软布把表面的浮水吸干。一是要注意光伏电站的除尘时机除尘的时候,应尽量避开光伏电站比较好工作时间,在高温和强烈光照下,光伏电站有高电压、大电流,稍有不慎会给清扫人员带来电击伤害以及可能对组件的破坏,建议选择清晨、傍晚的时候进行组件清洁工作,因为这段时间光伏电站工作效率低、发电量小,减小清扫的风险。
国自机器人获评首台(套)项目一览,2014年变电站KYN开关柜智能操控机器人;2015年基于多驱动单元同步控制的重载搬运机器人;2016年面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!适用各种规格的光伏组件,光伏组件安装平整度低。

关于数据传输:光伏清扫机器人系统配2个数据传输模块,用于机器人本体、摆渡车、服务器之间的传输,本体安装物联网卡用于云平台及本地服务器的网络通信。关于机器人数量:光伏清扫机器人应用在电站中,根据方阵的布局,设计停机架、桥接、摆渡车等辅助性结构,并确定机器人清扫范围和机器人数量。关于控制系统:配套光伏清扫机器人管理系统,提供云端部署和管理使用权限;支持提供管理系统项目本地内网服务器部署;提供光伏清扫机器人管理系统软件接口文件,可支持与其他平台的数据对接。
它是具备远程监控功能,操作人员可以在控制中心通过网络远程查看机器人的工作状态。新疆电站清洗机器人价格
卫生安全方面,机器人的运行不需要人工干预,避免了人工清洁过程中可能产生的伤害和污染风险。浙江智能清洗机器人报价表
国自机器人获评首台(套)项目一览:2014:变电站KYN开关柜智能操控机器人;2015:基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人2017:基于测量式激光导航的叉式搬运机器人物流系统2020:SUNBOT子母式跨阵列作业光伏清洁机器人碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁.浙江智能清洗机器人报价表