国自机器人获评首台(套)项目一览:2014,变电站KYN开关柜智能操控机器人 2015,基于多驱动单元同步控制的重载搬运机器人2016:面向太阳能光热发电场的镜面清洗机器人 2017,基于测量式激光导航的叉式搬运机器人物流系统 2020,SUNBOT子母式跨阵列作业光伏清洁机器人 碳中和:碳中和是指一个组织在一年内的二氧化碳(CO2)排放通过二氧化碳去除技术应用达到平衡,就是碳中和或净零二氧化碳排放。根据不同的光伏电站特性,配置相应的机器人组合,灵活高效的实现光伏电站的无人化清洁!光伏智能清扫机器人小巧灵活的设计,能够适应不同的规格和安装环境的光伏面板。河北电站清扫机器人报价

辊刷拼接设计,易于组装和维护!自适应倾斜行走驱动装置可轻松应对光伏组件阵列从上到下、从左到右、从前到后的变化;光伏组件的框架用作轨道,无需铺设轨道,成本低,便于现场安装和施工。自适应跟踪装置**提高了光伏组件阵列桥接的施工效率,缩短了施工周期;电控系统抗干扰能力强,耐高低温,可靠性和稳定性好;**控制实现所有清洁机器人的智能调度;这是目前理想的光伏组件清洁方案;机器人清洁效率是人工清洁的3-5倍、成本低(*为手动清洁成本的30%-50%)等诸多优点!宁夏光伏智能清扫机器人厂家它具备着远程监控功能,操作人员可以通过网络远程查看机器人的工作状态。
光伏板清扫机器人发展前景预测的方法很多,主要有以下几种:1、时间序列在光伏板清扫机器人发展前景预测中,经常遇到一系列依时间变化的经济指标值,如光伏板清扫机器人企业产品按年(季)的销售额、供给量等,这些按时间先后排列起来的一组数据称为时间序列。依时间序列进行预测的方法称为时间序列预测。2、回归(1)“回归”的含义。回归是指用于分析、研究一个变量(因变量)与一个或几个其它变量(自变量)之间的依存关系,其目的在于根据一组已知的自变量数据值,来估计或预测因变量的总体均值。在经济预测中,人们把预测对象(经济指标)作为因变量,把那些与预测对象密切相关的影响因素作为自变量。根据二者的历史和统计资料,建立回归模型,经过统计检验后用于预测。回归预测有一个自变量的一元回归预测和多个自变量的多元回归预测,这里*讨论一元线性回归预测法。
光伏组件清扫机器人一、人工干洗光伏板操作人员采用长柄绒拖布配合**洗尘剂进行清洗,干洗的工作周期约为3天/10MW,费用约为12000-13000元/10MW。主要原理:利用静电吸附原理,具有吸附灰尘和沙粒的作用,增强尘推吸尘去污能力,能有效地避免在清扫时的灰尘沙粒飞扬。人工干洗光伏板的缺点:不同操作工的力量不同,对组件造成的压力不同,会使得组件变形过大,造成电池片隐裂,另外一个缺点是,干洗组件效果不佳,常常因拖把沾有过多灰尘,在组件表面上留有部分痕迹,造成大面积阴影遮挡。
德天智能清扫机器人凭借其高效率、智能的清扫能力,能够很大程度减少光伏组件表面的灰尘和污垢!

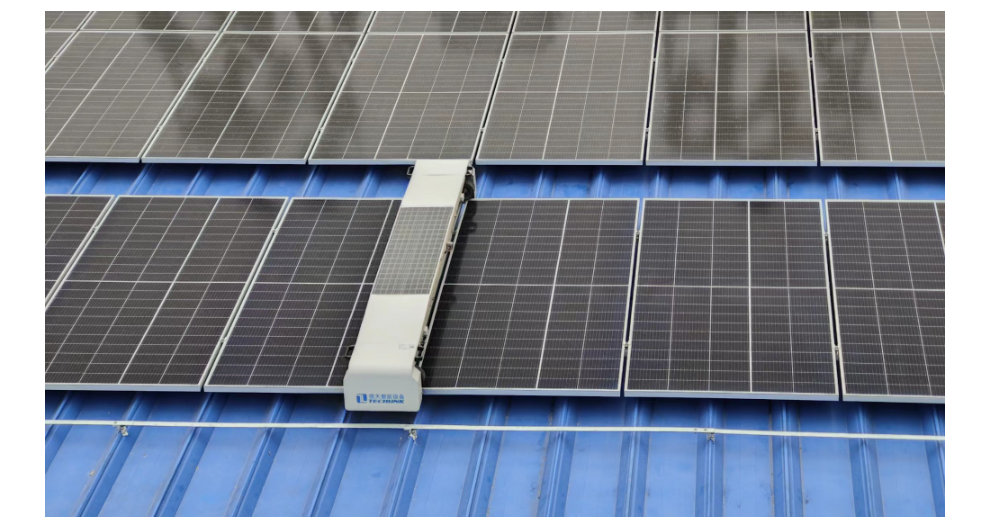
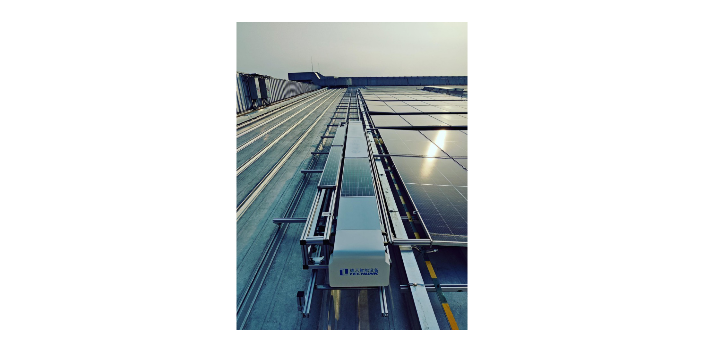
光伏清扫机器人是一种特定应用于光伏电站的清洁机器人,旨在提高光伏电站的发电量和收益。它可以清洁光伏板表面的灰尘、污垢和鸟粪等污染物,提高光伏板的发电效率,同时减少人工清洁的时间和成本。光伏清扫机器人通常由以下几个部分组成:清洁毛刷:清洁毛刷是光伏清扫机器人的部分,螺旋式毛刷可以深度清洁光伏板表面的灰尘、污垢和鸟粪等污染物。行走轮:光伏清扫机器人的行走路可以直接行走在光伏组件边框上。控制系统:清扫机器人采用先进的控制系统,可以实现机器人的自主导航和避障。电池组:清扫机器人采用高效的磷酸铁锂电池,自充自用。
光伏智能清扫机器人的出现,为光伏电站的运维管理提供了一种高效、便捷、智能化的解决方案!湖北光伏清扫机器人
光伏组件的框架用作轨道,无需铺设轨道,成本低,便于现场安装和施工。河北电站清扫机器人报价
原铝的积累量不断增加,废料回收有巨大的发展潜力。铝合金的回收和再生是一项十分复杂的技术工作,由于各种铝制品使用范围宽广而且分散,如何回收、集中、分类、实现再生加工是一项十分繁杂庞大的系统工程。全世界不同合金成分、不同性能的铝合金数以百计,其中许多合金中的成分元素相互排斥,互不兼容,如何以**简易的方法、比较低廉的成本和***的工艺使废铝的再生成分合乎理想合金要求,其性能满足使用需要,质量能达到或接近原生材料的水平,是世界和国正在追求的目标。目前发达国家已形成了较为完善的废杂铝收集、熔炼、管理、分检系统,适应不断扩大的市场需求。河北电站清扫机器人报价