- 品牌
- TOYO
- 型号
- 齐全
- 输入方式
- 触摸屏输入
- 产品认证
- ISO9001,质量保障
- 外形尺寸
- 齐全
toyo伺服电机的控制方式一般有以下三种:速度控制方式,转矩控制方式,位置控制方式。转矩控制:toyo伺服电机的转矩控制方式是通过输入外部模拟量或直接地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为:设定10V对应10Nm,当外部模拟量设定为5V时电机轴输出为5Nm;如果电机轴负载低于5Nm时电机正转,外部负载等于5Nm时电机不转,大于5Nm时电机反转(通常在有重力负载情况下产生)。toyo伺服电机的应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。位置控制:toyo伺服电机的位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度。由于位置模式中,脉冲的个数与电机的位置之间存在一一对应关系,因此可以对位置实现严格的控制,所以toyo伺服电机一般应用于有定位要求的装置中。应用领域如数控机床、印刷机械等等。速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制。此次新工厂的扩张,为TOYO的发展提供更好的平台和更大的空间。高精度TOYO机械手型号
TOYO
一、toyo电动缸测试系统的硬件设计toyo电动缸测试系统主要包括:安装台架、液压加载油缸、轮辐压力传感器、CAN控制器、驱动器、显示控制仪、PC以及开关按钮等。由于测试需要给待测电动缸施加额定载荷,为方便系统的使用和操作。若采用toyo电动缸做为加载装置,则需加载电动缸和待测电动缸做到同步运动控制,否则会导致待测电动缸的结构发生损坏。而液压缸通过对压力阀值的调整可以做到自动泄压,不会损坏待测toyo电动缸。压力加载液压系统主要通过调节溢流阀和节流阀来实现改变液压加载马达进出液压缸的油压差,并通过单向阀组成的液压油路来实现加载马达的正、反转给液压加载系统的补油。同等输出功条件下,液压缸结构较电动缸更为紧凑,具有自动过载保护功能,液压缸机械系统能进行自行润滑,运动过程**率损失产生的热量可以由油液带走,无需安装额外的散热系统。称重传感器是一种将重量信号或拉、压力信号转换为可测量的电信号,并将电信号输出的装置。自动化TOYO丝杆功能从动态响应来讲TOYO直线电机因运动惯量和间隙以及机构复杂性等问题而占有很大地优势。
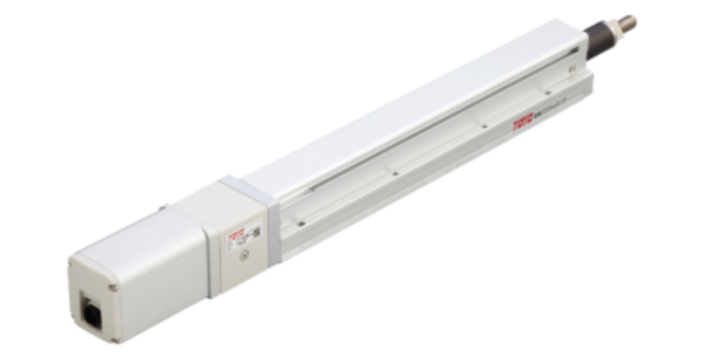
伺服电动缸的优点如下:一是承载能力高。其受力为多线接触,接触面的增加,使得其承载能力及刚度都大幅提升,可以承受上百吨的载荷。二是运行寿命长。使用滚珠丝杆等精密件传动,减少了材料磨损,增加了工作寿命。三是速度和加速度高。速度可至2000mm/s,输入转速可以在5000rpm或更高,加速度可达到10m/s2。四是定位精度高。伺服电动缸采集到的信号经过放大后驱动电机,使得电动缸产生输出,其信号采集和信号处理方式与传统的线性执行器基本一致。五是电气系统同步性能较好。在某些同时需多个线性执行器完成协调运动的场合,用气压与液压缸缸则往往难以保证其精确度,而利用电气系统的频率特性实现一致比较方便,因此用伺服电动缸则比较容易达到同步协调。六是能适应各种工作环境、无油污染。依据具体要求所设计的电动缸能够防腐、防爆,在不同恶劣环境中也能照常工作。七是结构较为紧凑,其空间利用率较高。伺服电动缸不像液压缸和气缸那样需要阀门、管道、接头以及过滤器等复杂的成套系统支撑,因此其体积相对较小。八是是维护简单、方便,工作可靠性较高。伺服电动缸的售后服务成本远低于气缸与液压缸。
通过液压工作站实现对加载液压缸的控制对待测toyo电动缸进行额定载荷的加载。在电动缸活塞杆底部安装轮辐式压力传感器,将传感器与显示器控制仪相连,可以实时显示电动缸加载的大小。通过调整液压工作站的溢流阀,同时观察显示控制仪上读数可以将载荷调整至额定载荷,加载范围可控制为(0~15)t。通过控制箱实现对待测toyo电动缸的运动控制,CAN控制器可实现与伺服驱动器、压力传感器和PC端之间的实时通讯。在运动过程中液压缸端部通过法兰连接始终与待测toyo电动缸保持固定,以保证对待测电动缸的持续加载。将待测toyo电动缸的伺服驱动器、轮辐压力传感器分别通过RS232串口与CAN控制器相连接,驱动器可检测伺服电动机的直流母线电压、电流、实际转速等数据,同时轮辐传感器内实时压力数值传输至CAN控制器内。将CAN控制器与PC端通过CAN转RS232通讯方式建立联系,通过PC软件端采集处理转速、电压、电流、压力等数据,可以实时绘制各数据曲线以及toyo电动缸传输效率曲线。实现上位机PC端与试验平台数据的交互与处理。使用TOYO直线模组,自动打孔机打印刷定位孔,整个动作一气呵成,快速,准确,效率高。

重载伺服电动缸丝杠布置形式共有四种:一是丝杠转动,螺母移动。此形式伺服电动缸的丝杠竖直在上连接伺服电机一起转动,螺母在下端连接推杆带动滑块轴向移动。二是丝杠移动,螺母转动。该形式通过伺服电机带动螺母旋转,丝杠与滑块相连,随滑块向上移动,到达上止点时丝杠上端会占用较大空间,且需要限制伺服电动缸的丝杠转动和螺母的移动,使用较为复杂。三是丝杠转动并轴向移动,螺母静止。伺服电动缸应用此方式时丝杠移动占用较大空间,行程较大时刚性较差,因此只适用于工作行程较小的场合,并不适用大行程伺服压力机。四是丝杠静止,螺母转动并轴向移动,该方式结构简单,但实际应用较为不便。通过综合对比分析发现:方三和方式四在压力机上使用不便,方式二和方式三占用轴向空间较大,因此重载伺服电动缸一般选用丝杠转动且螺母上下移动的传动方式。这种布置形式的丝杠具有较好的刚性,结构也十分紧凑,正适用于大行程压力机的工作。但此结构伺服电动缸的螺母和丝杠运动过程中会发生相对转动,从而产生传动误差,影响运动精度,需要添加导向装置以限制螺母转动。东佑达TOYO丝杆系列模组 (GTH系列、ETH系列、GTY系列、Y系列)。工业东佑达无尘滑台功能
在与人们生活息息相关的各种制造里,都可以看到TOYO东佑达机械手技术活用的应用范例。高精度TOYO机械手型号
直线模组滑台应用非常***,那么直线模组的选型也非常重要,可参照下面的步骤:1.确定直线模组滑台的使用环境:根据使用环境判定为一般环境,洁净环境,恶劣环境?2.确定直线模组滑台安装方向。确定模组滑台为水平安装,臂挂安装或垂直安装。3.确定直线模组滑台搬运的负载。4.核算直线模组滑台运行的速度和加速度。5.直线模组滑台的容许力矩校核:计算静止(匀速)状态下和加减速状态下的各向力矩值:Ma,Mb,Mc。6.直线模组滑台的精度等级要求:明确需要的重复定位精度,行走平行度要求等。7.确定马达安装样式:常用的直线模组滑台安装方式有直连型,马达左侧安装,马达右侧安装,马达底侧安装等8.直线模组滑台行程限位开关方式。9.确定直线模组滑台的电机规格和功率。直线模组滑台的性能指标可以从以下方面进行衡量。直线模组滑台的精度特性:包含重复定位精度、定位精度、行走平行度、行走直线度、背隙等。直线模组滑台的运动特性:可搬运重量、抗力矩能力、运行速度、加速度、运行噪音等。高精度TOYO机械手型号
上海裕飞机电有限公司是以提供模组,直线电机,电缸,工业机器人为主的私营有限责任公司,公司始建于2010-05-07,在全国各个地区建立了良好的商贸渠道和技术协作关系。公司主要提供工业机器人及配件、自动化设备及配件、五金交电、电线电缆、计算机及配件、通讯产品的研发、设计、销售和维修,计算机软件开发。从事货物及技术的进出口业务。直线模组、电缸、直线电机、电动夹爪、四六轴机器人、协作机器人、柔性振动盘、螺丝供料及拧紧工具、中空旋转平台、DD马达、环形导轨线。等领域内的业务,产品满意,服务可高,能够满足多方位人群或公司的需要。上海裕飞机电将以精良的技术、优异的产品性能和完善的售后服务,满足国内外广大客户的需求。
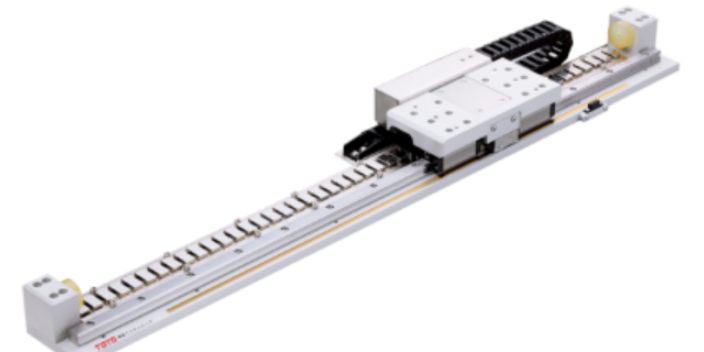
- 自动化东佑达轨道内嵌式滑台产品手册 2026-07-05
- 高精度TOYO东佑达皮带型直交机械手产品手册 2026-07-04
- 智能东佑达轴棒式线性马达机械手 2026-07-03
- 工业东佑达螺杆滑台功能 2026-07-02
- 自动化TOYO东佑达电动模组总代理 2026-07-01
- 东佑达电动缸华东总代理 2026-06-30
- 工业TOYO皮带滑台直供 2026-06-28
- 智能TOYO轨道内嵌式螺杆滑台供应 2026-05-26
- 高精度东佑达皮带滑台供应 2026-05-25
- 智能东佑达节卡协作机器人价格 2026-05-24
- 智能TOYO东佑达无铁芯线性马达机械手功能 2026-05-23
- 工业东佑达有铁芯线性马达机械手代理 2026-04-11