视觉点胶系统—飞行点胶功能:"旗众智能点胶系统的飞行点胶功能,即在打点运动的过程中,实现动态精细工艺拍照,减少反复起停稳定耗时,实现不停顿生产,大幅提高生产效率。"准确计算点胶位置,实现运动中点胶的“指哪点哪”效果,包括起点/终点准确定位以及每一个点的精确定位,可实现一秒加工十多个产品。当机器人运动到拍照点区域,其内部算法会利用高速IO信号触发相机进行动态无停顿拍照同时对实际拍照位置进行高速锁存,再利用相机回传的位置数据和机器人高速所存位置。智能化的视觉点胶系统为企业带来了生产效率和质量上的双重保障。中山自动化视觉点胶系统单位

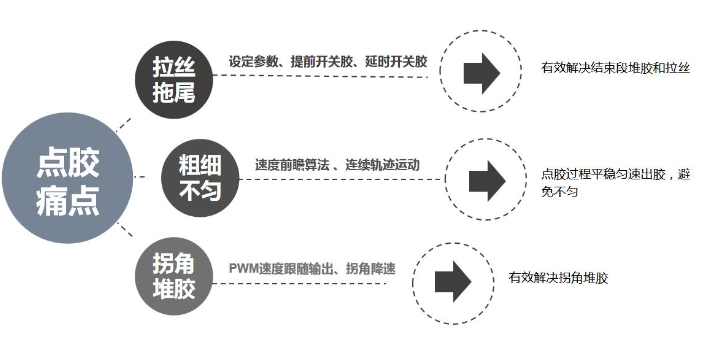
拐角堆胶降速、运动中变速等功能,避免出胶不匀,“大头”及拉丝现象;3、行业软件,精确控制胶量时间、涂胶速度,点胶时间,停胶时间等参数;4、可设置循环加工,循环次数、循环间隔时间可设置,设备不间断工作,节省中间上下料时间,提高生产效率;5、适用于一般的点胶机,一套系统即可完成针对不规则产品(如圆形、椭圆形、线条、半圆、弧形、曲线等)的随意点胶,满足多种加工样式,不需要专门的圆形点胶机来完成;6、不需要模具固定产品,产品可任意方向摆放,一次性整板定位模式,无需单个产品逐个识别,采用视觉自动识别定位并生成加工轨迹,快速完成圆形工件的点胶工作,快速提高生产效率;7、可导入和保存多个文件,相同产品无需重新编程,一次设计无限次使用,快速完成圆形点胶工作。适用产品:喇叭、音膜、蜂鸣器、轴承、五金饰品、微型电机、手表、音圈等。中山自动化视觉点胶系统单位视觉点胶系统利用先进的视觉技术和点胶技术相结合,提高了生产流程的自动化程度。

视觉点胶系统的重复精度可以根据具体的系统和机器人进行评估。重复精度是指机器在多次执行同一任务时能够重现相同位置的能力。它通常以公差或偏差的形式度量,并与机器的分辨率、控制系统的精度以及环境因素等因素相关。视觉点胶系统的重复精度需要会受到多种因素的影响,包括视觉传感器的精度、机器人的机械结构、控制系统的精度以及系统的校准程度等。通常情况下,视觉点胶系统的重复精度可以达到数十微米甚至更高的水平。然而,具体的重复精度会因不同的系统和设备而有所差异。
视觉点胶系统的适用性取决于其设计和材料选择。在高温环境下进行点胶需要存在一些挑战,但也有适用于高温环境的视觉点胶系统。针对高温环境下的生产,可以采取以下措施来确保视觉点胶系统的适用性和安全性:选择高温耐受材料:在高温环境下,点胶系统的部件应选用能够耐受高温的材料,如高温耐受的塑料或金属。这些材料能够在高温下保持稳定性和强度,不受热膨胀或熔化的影响。采用适应高温的粘合剂:选择能够承受高温的胶水或粘合剂是至关重要的。在高温环境下,普通的胶水需要会失去粘合力或产生质量问题。因此,在高温环境下使用专门设计的高温胶水能够确保点胶效果的稳定性和质量。散热设计:在高温环境下,点胶系统的散热也是一个重要考虑因素。过热需要会对系统的性能和稳定性产生不利影响。因此,视觉点胶系统应该设计合理的散热装置,以保持系统在高温环境下的正常运行温度。视觉点胶系统通过自动化流程减少了人为操作的不确定性,提高了生产效率。

视觉点胶系统在面对复杂的作业环境时,可以采取以下应对策略:传感器选择:选择适合复杂作业环境的高性能传感器。例如,使用高分辨率相机可以提供更精确的图像信息,而使用激光传感器可以在光线不足或表面反射性差的情况下实现精确的测量。光照控制:对于光线条件差的环境,可以使用额外的光源来提供均匀而稳定的照明,以确保视觉系统能够准确地捕捉到工作区的图像。此外,调整相机参数,如曝光时间和增益,以适应光线条件的变化也是重要的。图像处理算法:使用先进的图像处理算法来处理复杂的作业环境。例如,使用自适应阈值算法可以在光照不均匀的情况下实现稳定的目标检测和定位。还可以采用滤波、形态学操作等技术来减少噪声和提取目标特征。姿态检测与校准:针对目标物体在复杂环境中需要出现的倾斜、旋转或形变等情况,需要使用姿态检测算法来获取准确的目标姿态信息。此外,定期进行系统校准以确保视觉系统的准确性和稳定性也是很重要的。操作人员可以轻松设置参数,系统即可根据要求自动完成准确的点胶工作。东莞四轴旋转视觉点胶系统方式
该系统的高效率胶水应用使生产线能够快速满足客户需求,提升了企业的生产能力。中山自动化视觉点胶系统单位
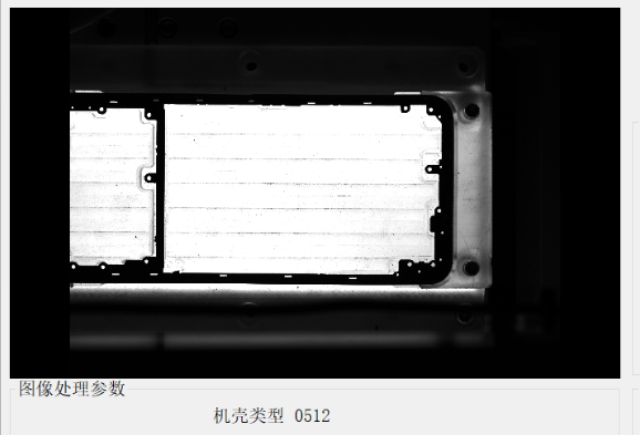
旗众智能视觉系统:视觉系统相当于设备的眼睛,可以让设备准确的识别产品的形状、颜色、位置等信息。普通视觉往往是针对特定行业的特定项目进行的定制性开发,不同应用场景则需要开发多款软件,这就使得传统视觉系统不具备通用性,而且需要技术人员编写底层代码,对使用人员要求很高。旗众开发了一款简单易易用的通用机器视觉系统,能适配所有需要使用视觉的设备,只需简单地将各个功能板块进行组合,就可以完成一个复杂的项目,有效缩短了开发人员的开发周期,为客户赢得了时间。中山自动化视觉点胶系统单位