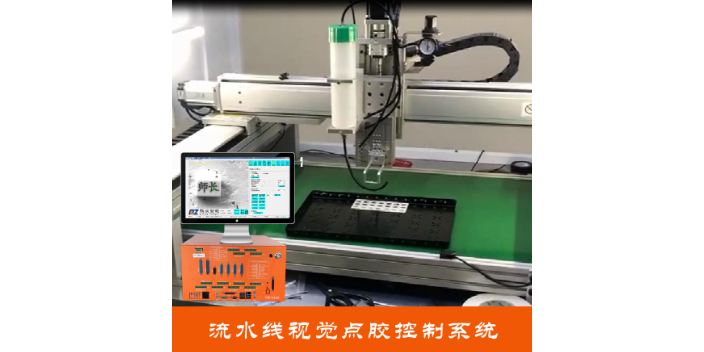
视觉点胶系统通常使用摄像头或激光传感器来实现精确定位和控制点胶过程。虽然具体的工作原理需要会因具体系统而有所不同,但是我可以给你一个一般的概述。摄像头工作原理:摄像头是一种光学传感器,通过使用透镜捕捉光线并将其转换为电信号来捕捉图像。它通常由成像传感器、透镜、光学滤波器和图像处理电路组成。工作过程如下:光线通过透镜进入成像传感器,成像传感器将光线转换为电信号。电信号经过电路处理和放大后,被转换为数字图像,这样就可以对图像进行分析和处理了。图像处理算法可以用于检测特定的目标、边缘、颜色等,并提取所需的信息用于点胶过程的位置校准和控制。视觉点胶系统在汽车制造中的应用保证了汽车零部件的质量和精度。杭州睫毛视觉点胶系统哪家靠谱
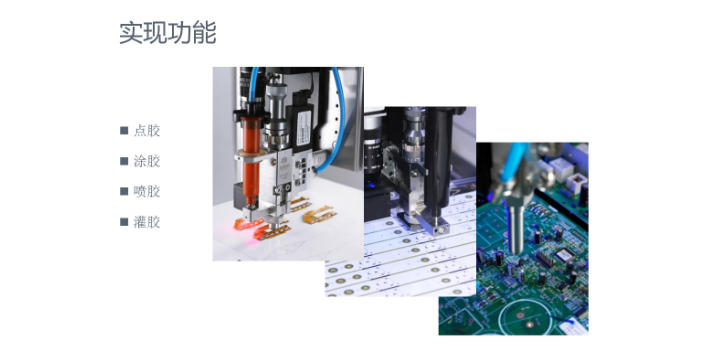
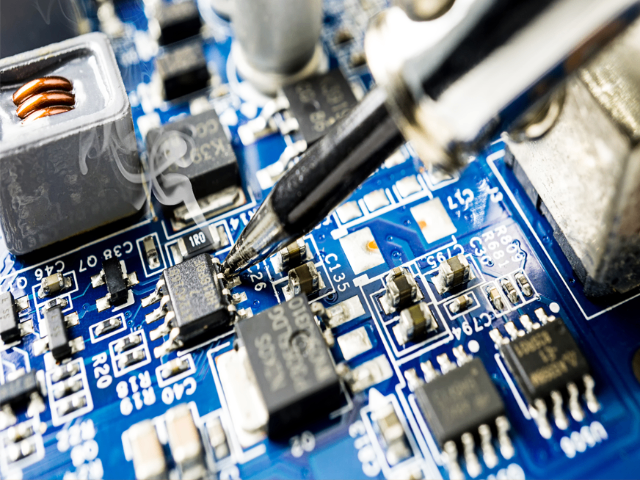
视觉点胶系统在精细电子产品制造中具有许多优势。以下是一些常见的优势:精确定位:视觉点胶系统使用高分辨率相机和图像处理算法,能够实时准确地识别和定位工件表面的特征。这使得点胶系统能够在正确的位置进行点胶,确保胶水被精确地应用到所需的地方。自适应能力:视觉点胶系统可以动态调整点胶路径和速度,以适应不同形状和大小的工件。它能够根据工件表面的曲率和轮廓进行自动适配,以确保胶水被均匀地分布在整个点胶区域。检测和校正:视觉点胶系统能够实时监测胶水的流动情况,并根据需要进行调整。如果检测到点胶不良或偏差,系统可以立即进行校正,以确保每个点胶操作的质量和一致性。灵活性:由于视觉点胶系统的可编程性,它可以轻松适应不同的产品和生产要求。通过更改点胶模式、参数和路径,系统可以应用于各种不同的应用领域和产品类型。中山多轴视觉点胶系统方式视觉点胶系统的自动化流程减少了人为操作的时间和风险。

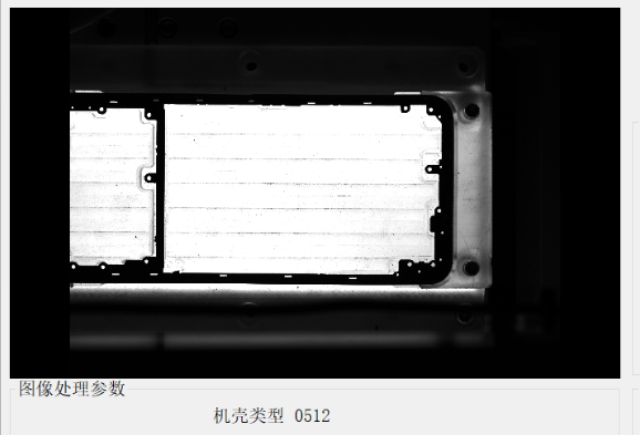
视觉点胶系统对产线布局有一些特定要求,以确保其正常运行和发挥较好效果。以下是几个重要的方面:相机位置和角度:视觉点胶系统通常需要安装相机以捕捉工件的图像。在产线布局中,相机的位置和角度应该能够获得清晰的图像,以便进行准确的定位和点胶。光照条件:光照条件对于视觉点胶系统的性能至关重要。在产线布局中,应考虑提供适当的光照,以确保工件图像的清晰度和对比度,从而有利于准确的图像处理和点胶操作。环境稳定性:视觉点胶系统对环境的稳定性要求较高。在产线布局中,应尽量避免强烈的振动、震动或其他干扰因素,以确保视觉点胶系统的正常运行和精确的点胶。适当的空间和位置:视觉点胶系统通常需要一定的空间来安装和集成。在产线布局中,应为视觉点胶系统提供适当的空间和位置,以便于操作、维护和调整。
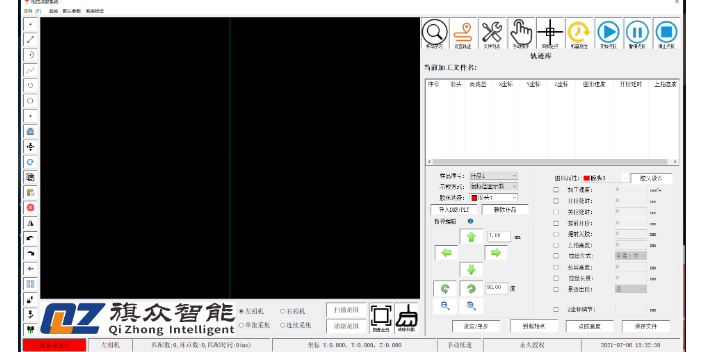
视觉点胶系统—坏点功能:在点胶过程中,你有没有遇到过不良品被加工或存在重复点胶的问题?别担心,有了我们的视觉点胶系统软件,这些问题将成为过去!我们的软件具备强大的坏板检测功能。通过高精度的图像识别和智能算法,它能够准确识别已经点过胶的产品,避免对同一产品进行重复点胶。而且当检测到表面存在缺陷的工件时,会自动跳过加工,有效减少废品率。在使用我们的软件时,您只需打开坏板检测功能,将产品放在加工台面上,软件将自动进行图像识别,并标记已经点过胶的区域。这样,即使产品再次经过点胶区域,软件也会及时发出警示,确保不会重复点胶。使用我们的软件,可以让设备轻松区分已经点过胶的产品,避免重复点胶和不良品的产生。无论是批量生产还是小批量定制,我们的软件都能为您提供高效、准确的点胶解决方案。融合全景和局部视觉系统,视觉点胶系统具备了适用于多种场景的优势。
视觉点胶系统的重复精度可以根据具体的系统和机器人进行评估。重复精度是指机器在多次执行同一任务时能够重现相同位置的能力。它通常以公差或偏差的形式度量,并与机器的分辨率、控制系统的精度以及环境因素等因素相关。视觉点胶系统的重复精度需要会受到多种因素的影响,包括视觉传感器的精度、机器人的机械结构、控制系统的精度以及系统的校准程度等。通常情况下,视觉点胶系统的重复精度可以达到数十微米甚至更高的水平。然而,具体的重复精度会因不同的系统和设备而有所差异。视觉点胶系统的高精度和稳定性使得其在精密仪器制造中备受青睐。中山多轴视觉点胶系统方式
视觉点胶系统可以根据不同产品要求灵活调整胶水点胶位置。杭州睫毛视觉点胶系统哪家靠谱
视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在各关节的误差进行补偿,保证其运动的精度和准确度。视觉位置校准:首先需要安装并调试好相机、光源等视觉系统硬件设备。然后需要准备标定板,标定板上通常会有一系列已知大小的标记,可以通过标记在图片中的位置来计算相机内外参数,建立相机坐标系和机床坐标系之间的转换关系。进行视觉位置校准时,需要通过点胶笔尖和相机之间的坐标变换,将视觉坐标系中的点转换到机床坐标系中。杭州睫毛视觉点胶系统哪家靠谱