视觉点胶系统在应对不同尺寸和形状的工件时,通常采用以下方法:工件识别:视觉点胶系统使用摄像头或激光传感器获取工作环境中的图像信息,并通过图像处理和识别算法来实时检测工件的形状、大小和位置等特征。系统可以预先存储不同尺寸和形状的工件样本,并与实际工件进行比对,从而确定工件的类型和位置。模板匹配:视觉点胶系统可以使用事先建立的工件模板进行匹配。通过对不同尺寸和形状的工件进行模板训练,系统可以在后续的操作中通过模板匹配来确定工件的位置和形状。自适应算法:视觉点胶系统中的图像处理软件通常具有自适应算法,可以根据不同尺寸和形状的工件动态调整参数和算法,以适应不同的工件需求。系统可以根据工件的特征自动调整点胶的位置、速度和压力等参数,从而实现对不同尺寸和形状工件的精确点胶。视觉点胶系统通过数据分析可以帮助企业了解生产线效率,并进行优化。杭州流水线跟随视觉点胶系统厂家

视觉点胶系统的数字化转型进程可以通过以下途径来推进:数据化采集:数字化转型的第一步是通过各种传感器、控制器和相机等设备进行数据采集,获取实时的生产和设备参数数据,在点胶过程中,要采集液体的流速、流量、粘度、温度等关键参数,以便优化点胶流程。数据分析:将实时采集的数据进行处理、分析和展示,例如将点胶结果与设计图进行比较,以便及时发现点胶问题,为生产工艺优化提供参考。机器学习与人工智能:机器学习和人工智能技术可以帮助分析大量的数据,发现点胶过程中的潜在问题,同时也可以根据历史数据预测不同参数下点胶质量的变化趋势,节约调试时间和生产成本。智能化控制:针对点胶过程中的不同环境和不同场景,可以开发智能化的控制算法,实现自动调节控制、自动预警和自动报警,为生产工艺提供更高的效率和精度。R轴旋转视觉点胶系统服务商该系统的高度自动化设计减轻了操作人员的工作负担,提升了生产效率。
我们都知道,视觉点胶系统可以帮助我们在工业生产中进行高精度的点胶操作。而搭配上高清工业相机镜头后,简直就是如虎添翼!有了高清工业相机镜头,你可以轻松地调节焦距,捕捉物体的不同细节,让你的点胶作业更加准确、精确。无论是小尺寸的产品还是大型装置,进退自如,一气呵成!更棒的是,这个视觉点胶系统还可以根据设备的应用场景配备的飞拍相机镜头,无论是追踪移动目标、进行快速点胶还是拍摄运动景象,都可以轻松搞定!我们为您配置合适的品牌高清工业相机镜头,全程指导相机光源安装,保证视觉精度!
全景+局部双重视觉定位视觉点胶系统是一种结合了全景视觉系统和局部视觉系统的点胶定位方案。它的原理是通过两个不同的视觉系统协同工作,实现对工件的准确定位和点胶操作。全景视觉系统是系统的主要部分,它通常由一个或多个摄像头组成,用于获取工作环境中的全景图像。这些摄像头安装在固定位置,可以涵盖整个点胶工作区域。全景视觉系统使用高效的图像处理算法对全景图像进行分析和处理,提取出工件的整体特征和位置信息。局部视觉系统是系统的辅助部分,通常由一个或多个激光传感器、摄像头或其他高精度传感器组成。它们用于对工件进行更细致的检测和定位。局部视觉系统能够获取工件的局部特征,如边缘、孔洞、标记点等,并提供更高精度的位置信息。在工作过程中,全景视觉系统首先获取全景图像,并使用图像处理算法进行特征提取和目标识别,确定工件的大致位置和姿态。然后,局部视觉系统辅助进行更准确的定位,通过对工件进行细致的检测和分析,提供更精确的位置信息。视觉点胶系统不只提高了生产效率,很大程度降低了废品率。

视觉点胶系统可以应对不同的工件材料,具有一定的适应性。下面是一些视觉点胶系统应对不同工件材料的方法:材料识别:视觉点胶系统可以通过图像处理和分析,识别不同类型的工件材料。系统可以根据工件表面的颜色、纹理、形状等特征,对材料进行分类,从而确定合适的点胶参数和路径。参数调节:根据不同的工件材料,视觉点胶系统可以自动调节胶水的流量、压力和速度等参数。不同的材料需要具有不同的粘附性和吸水性,系统可以根据材料的特性进行相应的调整,以确保合适的点胶效果。点胶路径优化:不同的工件材料需要需要不同的点胶路径。视觉点胶系统可以根据材料的形状和尺寸,优化点胶路径,确保胶水均匀地涂布在工件表面,并避免出现浪费或不足的现象。环境适应性:视觉点胶系统可以适应不同的工作环境和点胶工艺场景。无论是室内还是户外,无论是强光还是弱光环境,系统都能够通过图像处理和算法优化,准确地进行工件材料的检测和点胶操作。视觉点胶系统的智能化控制很大程度降低了人为操作带来的风险。杭州流水线跟随视觉点胶系统厂家
视觉点胶系统的出现为工业生产带来了创新性的改变,提升了生产线效率。杭州流水线跟随视觉点胶系统厂家
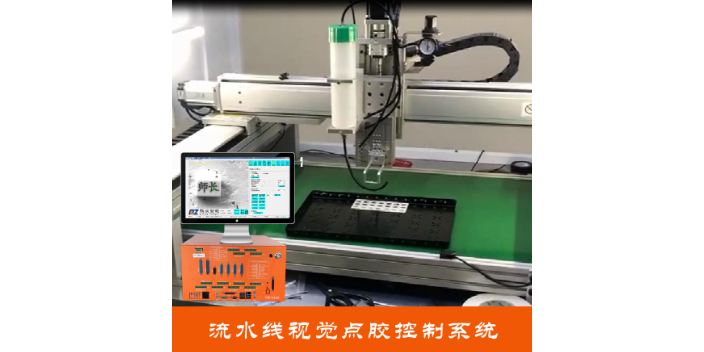
视觉点胶系统—飞行点胶功能:"旗众智能点胶系统的飞行点胶功能,即在打点运动的过程中,实现动态精细工艺拍照,减少反复起停稳定耗时,实现不停顿生产,大幅提高生产效率。"准确计算点胶位置,实现运动中点胶的“指哪点哪”效果,包括起点/终点准确定位以及每一个点的精确定位,可实现一秒加工十多个产品。当机器人运动到拍照点区域,其内部算法会利用高速IO信号触发相机进行动态无停顿拍照同时对实际拍照位置进行高速锁存,再利用相机回传的位置数据和机器人高速所存位置。杭州流水线跟随视觉点胶系统厂家