- 品牌
- FST
- 型号
- fst
- 自动化程度
- 全自动
- 加工定制
- 是
- 类型
- 上下料
我们的设备可以适应不同的生产环境和生产要求,可以实现多种自动化生产方式,如自动上下料、自动装配、自动检测等。我们的自动上下料设备还具有智能化的特点,可以实现自动化控制和监测,可以实时监测设备运行状态,及时发现问题并进行处理,保证设备的稳定性和可靠性。我们的自动上下料设备不仅具有高性价比,还具有良好的售后服务。我们的售后服务团队可以及时响应客户的需求,为客户提供专业的技术支持和服务,保证客户的生产顺利进行。总之,我们的自动上下料设备是一种高效、智能、可靠的生产方式,可以为客户提供好的产品和服务。我们相信,通过我们的努力和客户的支持,我们的自动上下料设备一定会在市场上取得更大的成功。江苏机器人机床自动上下料,请选择无锡法思特机器人自动化有限公司!常熟工业机器人自动上下料平台
尺寸检查是外观检查的一种。在判断零件或产品是否已按照规格进行过加工或组装时,它起着重要作用。这些尺寸检查可以通过图像处理实现自动化:测量零件或产品的尺寸测量O形圈的平均内径或外径或中心坐标测量金属零件的圆度或角度测量边缘和标签的位置测量片材/薄膜产品的宽度尺寸测量是检查的基础;但是,由于需要大量时间和精力,因此很难引入。随着工厂自动化(FA)的扩展,使用图像处理的尺寸测量已经增加。本页介绍使用图像处理进行尺寸测量的基本原理,优点和实际应用。压机自动上下料培训无锡切割自动上下料哪家好,请选择无锡法思特机器人自动化有限公司!
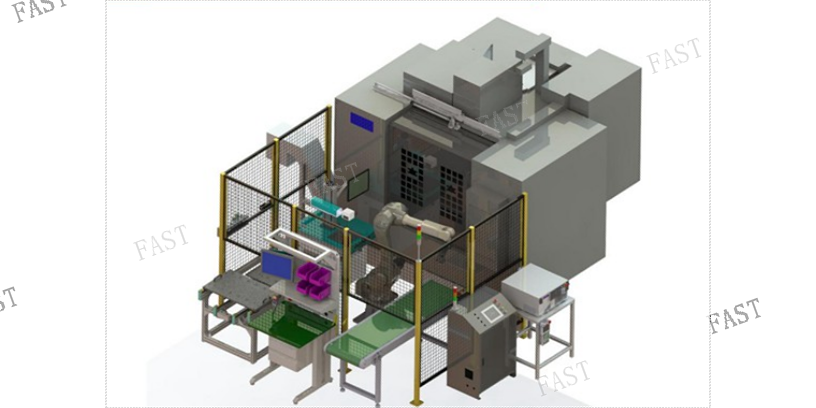
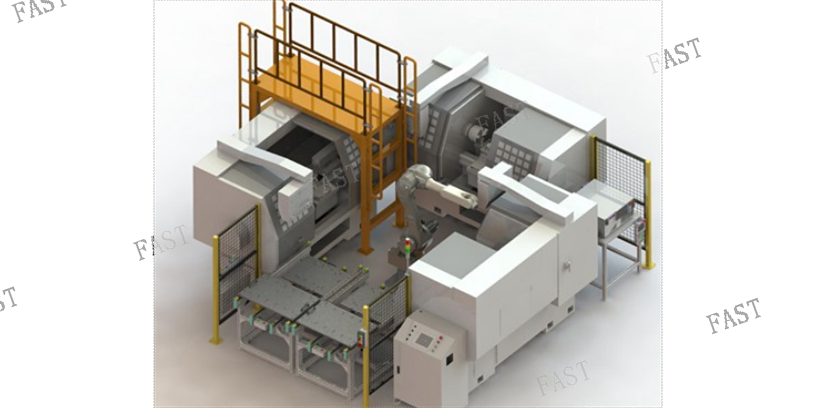
桁架机器人是数控机床自动化的组成部分采用桁架机器人输送先进的一面是,机床柔性加工自动线整体的自动化、智能化的协调统一。目前,汽车制造业中加工发动机缸体、缸盖及曲轴等大批量关键零件的柔性加工自动线,大都采用了桁架机器人输送。桁架机器人和数控机床紧密配合,组成无人上下料机加工系统,能够提高工作效率,降低用工成本。桁架机器人由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。桁架机器人应用于数控车床、加工中心、磨床、插齿机、清洁机等设备进行加工自动化上下料。它的的优势在抓取产品的稳定性好和重复定位精度高、噪音低等特点。基本部件都采用好的配置,设备运行稳定。桁架机器人由主体、驱动系统和控制系统三个基本部分组成。按机器人结构分类为直角坐标型,机器人沿二维直角坐标系移动。主体部分通常采用龙门式结构,由y向横梁与导轨、z向滑枕、十字滑座、立柱、过渡连接板和基座等部分组成,z向的直线运动皆为交流伺服电动机通过蜗轮减速器驱动齿轮与y向横梁、z向滑枕上固定的齿条作滚动,驱动移动部件沿导轨快速运动。移动部件为质量较轻的十字滑座和z向滑枕,滑枕采用由铝合金拉制的型材。横梁采用方钢型材。
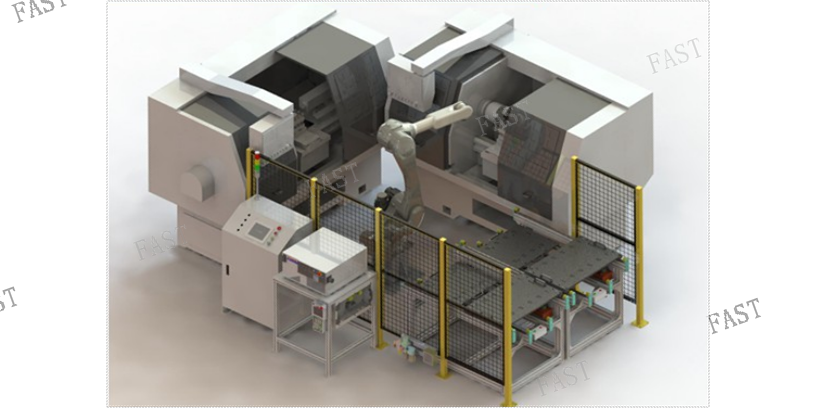
机床上下料的自动化实现方式主要有桁架机械手和关节机器人这两种方式。之前看的比较多的是桁架机械手,有人说自动上下料难点在于工位的布置,也就是产线的规划问题,很多公司要求紧凑化生产,常见的是U字型和圆盘式循环型。车间不够大,毛坯流进,成品流出的管理和搬运都是比较费空间的。接下来来看一下关节机器人为应对这些问题有什么优缺点。关节机器人——用于机械加工机床上下料的关节机器人采用的轴数一般为6轴,重复定位精度为±,常用的负载重量在8-75kg。BOERT机器人多型号展示机床上下料机器人一般分为一对一、一对二(机床面对面摆放)、一对三(机床摆成品字形),如果想要一台关节机器人对多台机床上下料,需要加上地面轨道,可实现一台关节机器人对多台机床自动上下料。常州打磨自动上下料哪家好,请选择无锡法思特机器人自动化有限公司!
自动上下料数控冲床主要性能特点1、强度高整体焊接床身,经CAD优化设计,振动时效及热时效双重去应力处理,具有高刚性及长期使用不变形的特点,提高冲压精度和模具寿命。2、精度丝杠导轨采用进口大导程滚珠丝杠和直线滚动导轨,确保机床的运动和定位精度。3、夹钳浮动式气动夹钳,在加工过程中能随板料浮动,保证板料加工精度。以适应不同材质的材料加工,其压力可调。夹钳头部的薄形结构可方便通过上下转盘,减少加工死区,扩大加工范围。4、CNC控制系统及编程采用品牌的数控系统和伺服单元,保证机床运行的可靠性。选用的系统为GOOGOLTECH数控冲床专门使用系统。其主要功能有现场编程或后台编程;实时与计算机通讯;强大地自诊断功能,实现夹钳自动保护;国际通用G代码编程,可实现远程诊断。5、用途多通用于各行业金属板材加工,能完成各种孔型、轮廓步冲,以及百叶窗、压窝等各种浅拉伸工艺,特别适用于多品种中小批量的钣金件加工。机器人机床自动上下料,请选择无锡法思特机器人自动化有限公司!山东压机自动上下料品牌排行
无锡法思特机器人自动化有限公司,专注从事机器人加工中心上下料!常熟工业机器人自动上下料平台
1990年10月,国际机器人工业人士在丹麦首都哥本哈根召开了一次工业机器人国际标准大会,并在这次大会上通过了一个文件,把工业机器人分为四类:⑴顺序型。这类机器人拥有规定的程序动作控制系统;⑵沿轨迹作业型。这类机器人执行某种移动作业,如焊接。喷漆等;⑶远距作业型。比如在月球上自动工作的机器人;⑷智能型。这类机器人具有感知、适应及思维和人机通信机能。日本工业机器人产业早在上世纪90年代就已经普及了和第二类工业机器人,并达到了其工业机器人发展史的鼎盛时期。而今已在第发展三、四类工业机器人的路上取得了举世瞩目的成就。日本下一代机器人发展重点有:低成本技术、高速化技术、小型和轻量化技术、提高可靠性技术、计算机控制技术、网络化技术、高精度化技术、视觉和触觉等传感器技术等。根据日本2007年指定的一份计划,日本2050年工业机器人产业规模将达到,拥有百万工业机器人。按照一个工业机器人等价于10个劳动力的标准,百万工业机器人相当于千万劳动力,是当前日本全部劳动人口的15%。常熟工业机器人自动上下料平台
- 滨湖区机器人自动上下料厂家 2025-11-19
- 南通磨床自动上下料平台 2025-11-19
- 锡山区机器人自动上下料集成厂家 2025-11-18
- 江苏数控车床自动上下料牌子 2025-11-18
- 浙江工业机器人自动上下料设备 2025-11-17
- 工业机器人自动上下料维修 2025-11-17
- 工业机器人自动上下料自动化 2025-11-16
- 昆山数控车床自动上下料联系方式 2025-11-15
- 昆山油压机自动上下料设备厂家 2025-11-14
- 浙江工业机器人自动上下料 2025-11-14
- 张家港油压机自动上下料方案设计 2025-11-13
- 滨湖区压机自动上下料售后服务 2025-11-13