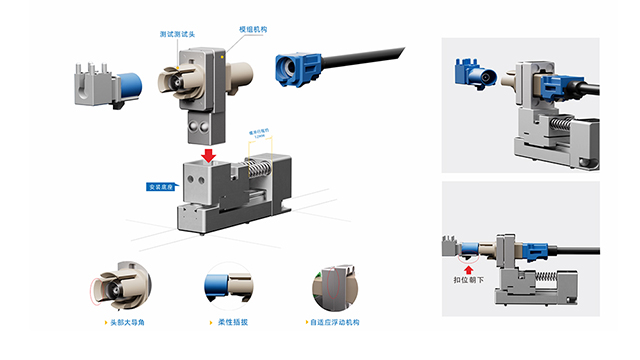
高精度汽车电子测试转接头是实现车载电子系统参数精确测量的基础。其阻抗匹配设计需与被测汽车电子部件的特性阻抗(通常为 50Ω 或 75Ω)保持一致,在 1MHz 至 1GHz 的频率范围内,反射损耗需优于 - 20dB,避免信号反射导致的测量误差。对于自动驾驶系统的毫米波雷达测试,专门的转接头需支持 77GHz 的高频信号传输,插入损耗控制在 0.5dB 以内,确保雷达信号的相位与幅度测量精度。在激光雷达(LiDAR)测试中,转接头的时延误差需小于 1ns,以满足距离测量的高精度要求,为汽车电子传感器的性能验证提供准确的连接通道。带锁扣的汽车电子测试转接头,防止汽车电子测试过程中因振动导致脱落。深圳新能源汽车电子测试标准
自动化测试序列是汽车电子测试模组的**竞争力,通过脚本化编程实现测试流程的无人值守。主流模组支持 CAPL、Python 等脚本语言,测试工程师可定义信号激励、判定条件与报告生成规则,形成标准化测试用例。模块化的测试序列设计允许复用成熟测试模块,如 CAN 总线通信测试、PWM 信号解析等,新测试项目的开发效率提升 40% 以上。智能执行引擎能根据测试结果动态调整后续步骤,例如当检测到异常信号时自动触发故障诊断流程,收集关键节点数据,大幅缩短问题定位时间。安徽高直通率汽车电子连接方案汽车电子测试转接头的信号衰减率,需控制在汽车电子测试标准允许范围内。
汽车电子测试模组的 OTA 测试功能验证车载系统的远程升级能力,支持 HTTP、MQTT 等 OTA 通信协议,可模拟不同网络环境(3G/4G/5G)的带宽与延迟特性。模组能生成符合 UDSonIP 标准的诊断消息,测试 ECU 的软件下载、校验、安装流程。在压力测试中,可模拟 thousands of vehicles 同时进行 OTA 升级的场景,验证服务器的负载能力与 ECU 的升级稳定性。升级过程中的断点续传、版本回滚等功能也可通过模组进行各方面验证,确保汽车电子测试模组的 OTA 功能的可靠性。
汽车电子测试模组的通信接口兼容性直接决定其应用范围,高级产品通常集成 CAN FD、LIN、Ethernet 等多种车载总线接口。CAN FD 接口支持 8Mbps 高速传输,可验证自动驾驶域控制器的实时通信性能;车载以太网接口符合 IEEE 802.3bw 标准,满足 100BASE-T1 的测试需求;LIN 接口则用于车身控制模块等低速网络的验证。接口转换模块实现不同总线协议间的透明转发,支持跨网络测试场景,如验证 CAN 与 Ethernet 之间的网关转发性能。这种多接口设计使模组能覆盖从传统汽车到智能网联汽车的全谱系电子系统测试。线控底盘测试,稳定信号传输是基石。虎连,筑牢基石。
汽车电子测试模组的实时性是验证控制系统动态性能的基础,其硬件定时精度达 100ns,软件任务调度周期可低至 1ms。在动力总成控制测试中,模组能精确同步采集曲轴位置信号与喷油控制信号,时间偏差小于 50μs;在底盘电子测试中,可模拟路面附着系数突变,验证 ESC 系统的响应时间。实时操作系统(RTOS)的采用确保了测试任务的确定性执行,避免多任务调度导致的时间抖动。通过与硬件在环(HIL)系统集成,测试模组可构建高保真的虚拟测试环境,复现车辆在各种工况下的动态响应。汽车电子测试转接头的认证标识,是其符合汽车电子行业标准的重要凭证。江苏智能汽车电子可靠性测试
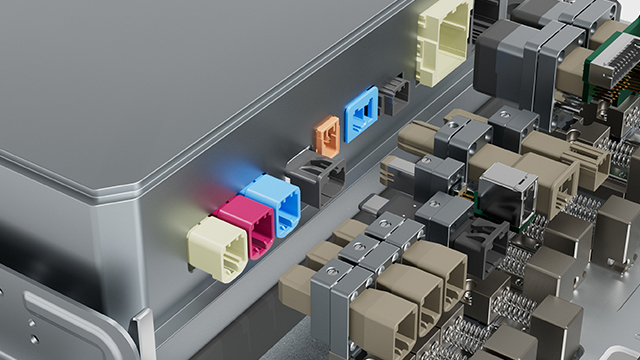
宽电压汽车电子测试转接头,兼容 12V/24V 汽车电子系统的测试需求。深圳新能源汽车电子测试标准
汽车电子测试模组的硬件设计需满足车规级环境要求,工作温度覆盖 - 40℃至 85℃,振动耐受达 10-2000Hz/10g 加速度。。关键处理单元多采用 ARM Cortex-A 系列处理器,主频不低于 1GHz,确保复杂测试算法的实时运行。信号调理模块采用高精度运放与滤波电路,将传感器输入的 mV 级信号放大至可采集范围,同时抑制共模干扰,信噪比优于 80dB。电源模块支持宽压输入(9-36V),兼容 12V/24V 车载电源系统,并具备过流、过压保护功能。这种硬件设计使测试模组既能在实验室稳定运行,也能部署于车辆实测试验中。深圳新能源汽车电子测试标准