堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。取放货机构左右两块定板通过载物台连接并安装在横梁上,左右方向的定板、中板和外板通过伸缩导轨依次连接在一起。安装在定板上的传动组件带动中板进行前后方向滑动,同时外板通过传动链1及传动链与中板进行同步随动。拨叉组由安装在左右外板上的四个拨叉组成,即前拨叉组和后拨叉组,前后拨叉组依据取放机构在不同的工作状态时,自动切换相应的位置(水平或垂直状态)。限位开关用于限制外板前后伸缩时的极限距离。堆垛机的运行需要一定的环境和条件支持,如稳定的电源供应、适宜的温度和湿度等。贸易巷道堆垛机要求
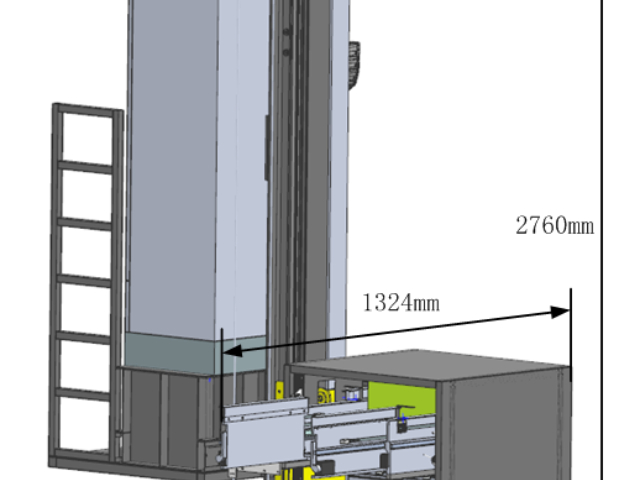
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。堆垛机的取放货机构装设于载货台上,如下图所示,其作用是实现垂直于巷道方向左右两侧货物的存取作业。取放货机构进行了货物防摔设计,可防止货物在搬运过程中滑动和跌落。取放货机构进行了防爆设计,可在防爆环境下使用。取放货机构的伸缩速度为0~30m/min变频调速,定位方式为电机内置编码器定位,定位精度≤±5mm。生产线边巷道堆垛机咨询问价在恶劣的环境条件下,堆垛机的性能和寿命可能会受到影响。

堆垛机的手动控制是由操作人员,通过操作面板直接操作机构进行运行,包括水平运行、载货台升降、勾取装置伸缩三种动作;手动控制既可以实现点动,也可以实现连续运行;单机自动控制是操作人员在出入库端通过堆垛机电控柜上的操作面板按扭,输入入(出)库指令,堆垛机将自动完成入(出)库作业,并返回入库端原位待令;联机自动控制:也称在线全自动控制。操作人员在计算机中心控制室,通过操作终端输入入出库任务或入出库指令,计算机与堆垛机通过红外通讯连接将入出库指令下达到堆垛机,再由堆垛机自动完成入出库作业。操作人员通过监控计算机屏幕动态画面实时了解堆垛机的位置及运行状态。
堆垛机技术要求通用部分:a)设备设计符合人机原理,操作方便安全,可相对大限度减少工艺动作,降低劳动强度并不会对操作人员的个人身体条件提出高于平常的要求。b)充分考虑设备的运行可靠性和无维修设计,设备运行稳定,故障率低,易于维修维护。c)设备安装、调整、换模、移位方便可靠。因发生以上工作时,设备不得出现因结构不合理引起的变形或破坏。d)设备设计制造充分考虑了产品质量的稳定性和品种适应性,有开放性结构方便后来的品种、型号变换和设备技术的升级换代。e)设备整体设计和安装质量符合国家有关规范,设备外型美观,结构工艺性合理并按规范工艺安装到位。尽管堆垛机已经实现了较高的自动化水平,但智能化程度仍然有限。

转轨堆垛机的结构组成转轨机构:这是转轨堆垛机的关键部件,通常由地面转轨机构和空中转轨机构两部分组成。地面转轨机构包括驱动装置、牵引链条、底座、活动道岔、链条张紧装置、侧导向条、端头挡块与开关装置等;空中转轨机构则由驱动装置、牵引链条、吊座、线性滑轨、活动道岔、链条张紧装置、端头挡块与开关装置等构成。其工作原理是驱动装置通过链条牵引活动道岔做水平平移,实现直轨和弯轨的自动切换,并且活动道岔运行到位时会触发定位开关,结合端头挡块保证轨道的精确定位。堆垛机主体:与一般堆垛机类似,包括底架、走行轮、导轮、升降台、载货台、货叉等部分。底架通过走行轮支承整机重量并沿天地轨方向运动,升降台由提升钢丝绳悬挂,载货台在提升电机驱动下沿立柱表面轨道升降,货叉电机驱动货叉完成货物的存取动作。堆垛机具备自动导航、自动定位、自动避障等功能,能够实现高效的自动化作业。本地巷道堆垛机有哪些
堆垛机的工作原理基于物体的静态和动态平衡原理,通过计算机控制实现货物的精确定位和堆放。贸易巷道堆垛机要求
堆垛机的货叉伸缩速度是其重要的性能参数之一,以下是关于堆垛机货叉伸缩速度的详细介绍:常见速度范围一般情况下,堆垛机货叉的伸缩速度在5-40米/分钟之间。常见的普通堆垛机货叉空载伸缩速度约为20-30米/分钟,带载伸缩速度约为10-20米/分钟。在一些较为先进或高性能的堆垛机中,货叉伸缩速度相对高可达40米/分钟左右。对作业效率的影响出入库效率:货叉伸缩速度直接关系到堆垛机每次存取货物的时间。伸缩速度越快,堆垛机完成一次货物存取的周期就越短,单位时间内的出入库数量就越多,从而提高了整个仓库的物流周转效率。例如,在一个繁忙的电商仓库中,快速的货叉伸缩速度能够使堆垛机在相同时间内处理更多的订单货物,减少货物等待时间.仓库整体作业节拍:堆垛机的货叉伸缩速度需要与运行速度、升降速度等其他运动参数相匹配,以确保整个堆垛机系统的高效协同作业。如果货叉伸缩速度过慢,即使运行速度和升降速度较快,也会导致堆垛机在货位前等待货叉伸缩的时间过长,从而影响整个仓库作业的节拍和连贯性贸易巷道堆垛机要求