- 品牌
- 帝木
- 型号
- 齐全
- 基材
- 无
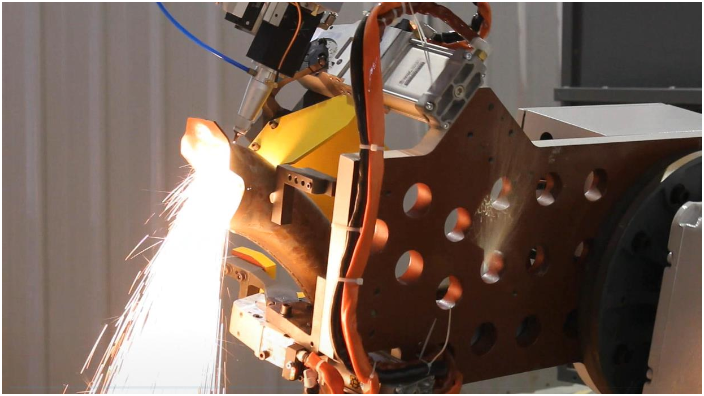
机器人点焊的工作原理主要依赖于电流通过焊接电极产生的热量,将金属工件局部加热至熔融状态,从而实现焊接。具体而言,机器人通过控制焊接电极的压力和电流,精确地将两块金属工件在接触点上进行加热和熔化,形成牢固的焊接接头。机器人系统通常配备有高精度的传感器和控制系统,能够实时监测焊接过程中的温度、压力和时间等参数,确保焊接质量的稳定性。此外,现代机器人点焊系统还可以与其他自动化设备如输送带、视觉系统等进行联动,实现全自动化生产,提高整体生产效率。机器人点焊技术在航空航天领域也得到了广泛应用。扬州智能机器人点焊生产线检测

在未来的发展中,无锡帝木自动化系统科技有限公司将继续秉承“创新、共赢”的理念,不断加大研发投入,提升技术水平,为客户提供更加质量、高效、智能的自动化解决方案,推动制造业向更高水平发展。选择无锡帝木自动化系统科技有限公司的机器人点焊生产线,就是选择高效、选择品质、选择未来!无锡帝木自动化系统科技有限公司致力于为国内外客户提供先进的自动化解决方案。公司在全球范围内拥有丰富的交钥匙工程项目管理经验,能够提供从设计到实施的一站式服务。公司的业务主要涵盖汽车整车及零部件的自动化生产线,包括机器人焊接、铆接、装配检测和产线自动化等系统。淮安智能机器人点焊生产线哪家好机器人焊接系统的维护简单,降低了运营成本。

生产线布局和优化:多机器人协同:设计多工位多机器人的复杂任务分配、调度和规划问题,以提高生产效率和灵活性。自动化控制系统:控制系统是实现生产线焊接作业自动化控制的重要基础,系统硬件组态设计是首要环节。仿真软件应用:引入ROBCAD等机器人离线仿真软件,利用3D图形设计焊接生产线仿真系统和控制系统,优化工业机器人焊接生产线的不同工艺划分和不同结构布局。自动化控制系统的实现:精确控制参数:通过自动化控制系统实现电流大小、焊接时间等参数的精确控制,从而实现焊接过程的全自动化。智能化技术:采用免示教智能焊接技术,通过信息获取、知识表示、推理与决策、执行与反馈四个流程,实现焊接过程的精确可靠。
点焊生产线的布局设计需要综合考虑多个因素。首先要根据焊件的生产流程和工艺要求确定各个工位的顺序。例如,如果焊件需要先进行预加工,然后再进行点焊,那么预加工工位要在点焊工位之前。要考虑机器人的工作半径和运动空间,确保机器人在点焊过程中不会相互干扰或与其他设备发生碰撞。物料输送装置的路线要与机器人的工作区域相匹配,保证焊件能够准确地到达和离开点焊工位。同时,还要考虑设备的维护和检修空间,在生产线周围预留足够的通道,方便维修人员对机器人、点焊设备和输送装置进行维护。合理的布局设计能够提高生产线的运行效率,减少占地面积,并且便于管理。生产线的设计符合工业4.0标准,具备高度智能化。
机器人点焊生产线对焊件质量有着积极的影响。其稳定的点焊参数控制,使得每个焊点的大小、强度和外观都高度一致。机器人的高精度定位能力确保了焊点位置的准确性,避免了因焊点偏移而导致的焊件强度不足问题。在焊接过程中,机器人能够精确地控制电极压力,使焊件在点焊过程中保持良好的接触,从而形成高质量的焊点。而且,由于点焊设备参数可以根据焊件的材料和厚度进行精确调整,减少了因焊接参数不合适而产生的虚焊、过焊等缺陷。这种高质量的点焊效果使得焊件在后续的使用过程中更加可靠,提高了产品的整体质量和使用寿命。机器人点焊技术的引入,提升了企业的生产能力。宿迁机器人点焊生产线装配
机器人点焊技术的应用,提升了产品的市场认可度。扬州智能机器人点焊生产线检测
机器人点焊生产线是现代制造业中一种高效、精确的自动化生产方式。它利用工业机器人进行点焊作业,广泛应用于汽车、家电和电子等行业。与传统的人工焊接相比,机器人点焊不仅提高了生产效率,还明显提升了焊接质量和一致性。通过编程,机器人能够在短时间内完成复杂的焊接任务,减少了人为因素对焊接质量的影响。此外,机器人点焊生产线还具备灵活性,可以根据不同的产品需求进行快速调整,适应多种生产环境。机器人点焊的工作原理主要依赖于电流通过焊接电极产生的热量来实现金属的熔化和连接。生产线上的机器人配备了高精度的焊接电极,通过控制电流的强度和焊接时间,确保焊接点的质量。在焊接过程中,机器人会根据预设的程序,精确地移动到指定位置,进行多点焊接。焊接完成后,机器人会迅速返回到起始位置,准备进行下一次焊接。这种高效的工作方式不仅提高了生产速度,还降低了能耗,符合现代制造业对节能减排的要求。扬州智能机器人点焊生产线检测
- 宿迁智能工厂机器人点焊生产线供应商 2026-03-09
- 连云港流水机器人点焊生产线工作站 2026-03-08
- 南通机器人点焊生产线集成商 2026-03-08
- 宿迁机器人点焊生产线安装 2026-01-22
- 宿迁流水机器人点焊生产线检测 2026-01-22
- 宿迁智能机器人点焊生产线工作站 2026-01-21
- 上海机器人点焊生产线安装 2026-01-21
- 苏州机器人点焊生产线解决方案 2026-01-20
- 南通机器人点焊生产线集成商 2026-01-20
- 扬州流水机器人点焊生产线检测 2026-01-19
- 上海机器人点焊生产线安装 2026-01-19
- 连云港流水机器人点焊生产线服务商 2026-01-18



