- 品牌
- 从宇
- 型号
- CY-GZ
- 加工定制
- 是
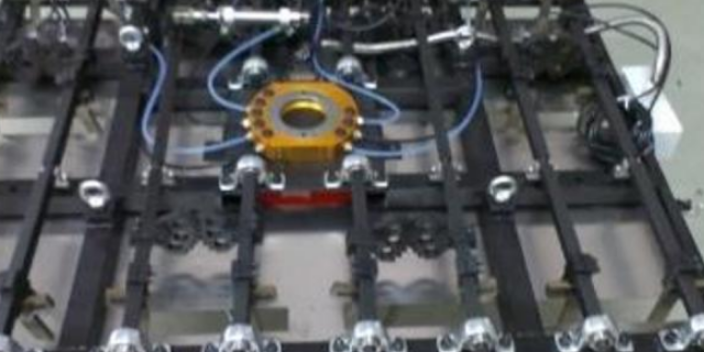
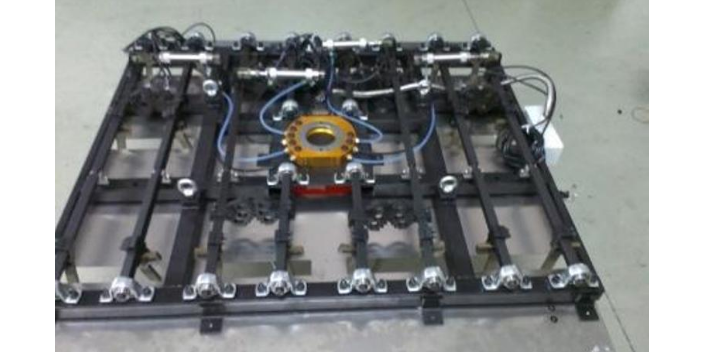
主下线区域车型防错①机舱通过APC输送,在下线之前,自动扫码枪读取车型配置,传递给UB/MB区域液晶屏显示上件车型配置,及UB10夹具、零部件放置台车型、机器人车型程序切换;②UB10工位显示屏显示车型配置,指导员工上对应的配置零件,车型夹具、置放台接受信号后,通过不同车型传感器识别装配后的件是否正确,机器人接收型号后,调动匹配车型程序进行焊接;③UB10焊接完成通过,将车型信息通过辊床输送传递给下个程序PLC系统,调用车型程序,可以通过传感器识别传递的车型是否与车型配置一致,后续持续保持此种传递方式,直至车身下线。工装夹具用于生产线的自动生产设备上?石家庄工装夹具方案
工装夹具
对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善,搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,机械臂进行焊装加工,带来的效率提升自然不言而喻。石家庄工装夹具方案自动化设备系统一定会需要配合的工装夹具!
智能化生产线设备的特性:
1、企业产品或零部件在各工装夹具的工装夹具使用和輔助运行及其工装夹具间的传送等均能全自动完成,具备较高的智能化水平。
2、生产加工节奏感更加严格要求,企业产品或零部件在各生产加工部位的延迟时间相同或成倍率。
3、企业产品方向一般是平稳没变的,或在较小规模内变动,并且在更改种类时要花很多时长完成人力凋整。
4、全程具备一致的自动控制系统,普遍选用机械自动化技术应用。
5、智能化生产线设备刚开始项目投资较多。
焊装防错焊装防错的工艺开发流程有6个阶段,包括:焊装工艺策划防错、焊装工艺分析防错、焊装工艺设计、焊装设备工装开发,焊装工艺验证、焊装工艺优化及维护。焊装防错工艺开发流程的前4个阶段。焊装工艺开发流程六个阶段防错1.焊装工艺策划防错焊装工艺策划阶段的防错,首先需将防错Checklist导入设计,然后根据类别对零部件进行分类管控,分别采取不同的技术策略。(1)相像(高难度识别):零部件结构相似,局部型面有变化,即使放在一起也难以识别,只能通过检具或三坐标识别;(2)相似(难识别):结构有不同,差异较小,不放在一起无法识别;(3)相近(易错装):零部件虽在结构、大小上有不同,但差异较小,有识别特征,但不明显,不能快速、清晰识别,容易混淆。组装防错工装用于组装过程中防止作业员错拿零件!

当人机交互时,触发光栅需立即停止所有的运动设备。区域安全门应设计请求停止按钮,在打开安全门前,请求停止设备,在设备稳定运行停止后,再打开门,以降低对设备的伤害;在没有请求停止时安全门打开,区域内所有设备立即停止;安全门必须关门后才允许复位起动。典型电气安全防护元件1.安全光幕安全光幕也就是光电安全保护装置(也称安全保护器、红外线安全保护装置),以保护人体为目的,具有检测导致危险产生的功能。2.激光扫描仪激光扫描仪是用扫描技术来测量工件区域及形状的一种仪器,内部采用稳定度和精度良好的旋转电动机。防错工作台防止取错零件装错产品!石家庄工装夹具方案
工装夹具专业设计找哪个公司?石家庄工装夹具方案
在现代工厂自动化设备中,夹具始终是设备的一个重要组成部分,其重要作用不言而喻。任何产品的加工、装配都离不开装夹、定位。而气缸则由于其本身的特点和优势——以非常简单的方式实现直线往复运动功能,而且其控制方法非常简单,这也就成为各设计师通常优先其作为自动夹具驱动器件的理由。当然,需要指出:自动夹具的驱动也并不仅由气缸驱动,很多场合也使用液压缸和电机驱动。因此,其在夹具中的使用也就成为其使用领域的重头戏之一。石家庄工装夹具方案

- 安阳工装夹具 2024-06-16
- 固定工装夹具厂家直销 2024-06-13
- 新能源工装夹具哪家好 2024-06-12
- 定制工装夹具设备 2024-06-11
- 直销工装夹具设备 2024-06-06
- 江苏工装夹具按需定制 2024-05-29
- 新能源工装夹具计算 2024-05-27
- 定制工装夹具服务至上 2024-05-26