-
 海南商用车姿态测试设备厂家电话
海南商用车姿态测试设备厂家电话武汉朗维科技有限公司的车身姿态测试设备,具备低功耗、长续航的优势,可满足户外长时间测试的需求,打破电源对测试工作的限制。该设备采用高效节能的组件与优化的电路设计,功耗控制在10W以内,相比传统设备功耗降低60%以上;同时,设备配备大容量锂电池,容量达到10000mAh,支持快充模式,充电2小时即可满电,满电状态下可连续工作8小时以上,完全满足户外长时间测试的需求,无需频繁连接电源充电,大幅提升测试工作的灵活性与便捷性。与传统设备需要连接市电才能工作,户外测试需要携带笨重的发电机不同,武汉朗维的车身姿态测试设备凭借长续航优势,可在无市电供应的户外场地、偏远地区等场景下正常工作,无需额外携带发电设...
查看详情>> 2026-04-17 -
 吉林乘用车姿态测试设备厂家
吉林乘用车姿态测试设备厂家武汉朗维科技有限公司的车身姿态测试设备,具备的环境适应性与运行稳定性,可在各类复杂场景下稳定工作,打破环境对测试工作的限制。该设备经过严格的环境模拟测试与可靠性验证,能够适应-40℃~85℃的极端温度范围,无论是高温酷暑的户外场地,还是严寒低温的北方地区,都能保持稳定的测量精度,不会因温度变化影响设备性能。同时,设备具备良好的防水、防尘、抗干扰能力,防护等级达到IP67,可在雨天、沙尘等复杂环境下正常工作,有效抵御雨水、沙尘对设备内部组件的侵蚀;其抗电磁干扰设计,能够避免周边电子设备、信号塔等干扰源对测试数据的影响,确保在工业厂区、交通繁忙路段等复杂电磁环境下,仍能输出可靠的数据。武汉朗维科技...
查看详情>> 2026-04-14 -
 福建车身姿态测试设备多少钱
福建车身姿态测试设备多少钱标准化设计是武汉朗维科技有限公司车身姿态测试设备的突出特点,确保了设备的兼容性与互换性,便于用户进行设备升级与系统集成。该设备严格遵循国家及行业相关标准,采用标准化的接口、通信协议与数据格式,可与实验室其他测试设备(如车轮力传感器、制动测试设备)实现无缝对接,构建一体化测试体系,提升测试工作的综合性与高效性。在功能上,设备支持标准化测试流程,可按照GB、ISO等相关标准自动完成测试操作,生成符合标准的测试报告,无需人工编辑,大幅提升了测试工作的规范性与效率;同时,设备的零部件采用标准化设计,可与同类产品的零部件互换使用,降低了设备维护成本与零部件采购成本。此外,武汉朗维科技积极参与行业标准制定...
查看详情>> 2026-04-14 -
 中国台湾汽车姿态测试设备厂家电话
中国台湾汽车姿态测试设备厂家电话武汉朗维科技有限公司的车身姿态测试设备具备强大的轨迹回放功能,可还原车辆测试过程中的车身姿态变化,为数据分析与故障排查提供有力支撑。该设备可详细记录车辆测试过程中的每一组车身姿态数据、行驶轨迹,通过数据分析软件,可实现测试过程的全程轨迹回放,直观呈现车辆在不同时间、不同位置的车身姿态变化,便于操作人员回顾测试过程,排查测试过程中的异常情况。在功能上,轨迹回放支持速度调节、暂停、断点回放等操作,操作人员可根据需求,重点查看某一时间段、某一工况下的车身姿态变化;同时,轨迹回放可叠加车身姿态参数曲线,直观呈现参数变化与行驶轨迹的关联,便于分析车身姿态异常的原因。此外,轨迹回放数据可与测试视频同步对接...
查看详情>> 2026-04-13 -
 甘肃多国标兼容车辆转向盘中心区试验设备价格
甘肃多国标兼容车辆转向盘中心区试验设备价格车身姿态测试设备是汽车研发、生产及检测环节的辅助设备,其度与稳定性直接决定车辆行驶安全、操控性能及乘坐舒适性,武汉朗维科技有限公司深耕该领域多年,凭借深厚的技术积累与严苛的品质管控,研发的车身姿态测试设备兼具高精度、高适配性与易操作性,成为行业内极具竞争力的产品。该设备特点在于采用多传感器融合技术,整合高精度惯性测量单元(IMU)、双天线GNSS定位模块及激光高度计,可实现车身姿态参数无死角采集,有效规避单一传感器测量的局限性,确保数据采集的完整性与准确性。在功能上,设备可实时捕捉车身侧倾角、俯仰角、转向角等角度参数,以及车身高度、轮距、轴距等线性参数,采样频率高达100Hz,能快速响应车身姿...
查看详情>> 2026-04-13 -
 内蒙古整车制动性能检测设备
内蒙古整车制动性能检测设备武汉朗维科技有限公司的车身姿态测试设备具备灵活的测试模式切换功能,可根据不同测试需求,快速切换静态测试与动态测试模式,提升测试工作的灵活性与高效性。静态测试模式下,设备可完成车身姿态的标定、零部件装配精度验证等工作,适用于车辆生产下线检测、实验室静态调试等场景,测试精度高,数据稳定性强;动态测试模式下,设备可实时采集车辆在行驶过程中的车身姿态数据,适配高速、颠簸、转向等复杂工况,响应速度快,可捕捉车身姿态的细微变化。在功能上,设备支持测试模式一键切换,无需重新调试设备参数,大幅节省了测试准备时间;同时,设备可根据测试场景的不同,自动调整采样频率、数据采集范围等参数,确保测试数据的准确性与有效性...
查看详情>> 2026-04-11 -
 黑龙江多国标兼容车辆轻便性试验设备价格
黑龙江多国标兼容车辆轻便性试验设备价格多传感器融合技术是武汉朗维科技有限公司车身姿态测试设备的技术亮点,也是设备实现、高精度测试的关键。该设备整合了高精度惯性测量单元(IMU)、双天线GNSS系统、激光高度计及阻尼电位器等多种传感器,各传感器协同工作,互补短板,实现了车身姿态参数的采集。其中,惯性测量单元内置三轴陀螺仪与加速度计,可快速捕捉车身角度与加速度变化,无需依赖外部参考点;双天线GNSS系统可提供精确的位置、速度和航向信息,提升动态测试的定位精度;激光高度计可实时监测车身高度与悬挂压缩量,为空气动力学分析与底盘调校提供依据。在功能上,设备通过自主研发的数据融合算法,将各传感器采集的数据进行整合与优化,剔除干扰信号,提升数据...
查看详情>> 2026-04-11 -
浙江多国标兼容车辆转向角度测量厂家
武汉朗维科技有限公司的车身姿态测试设备,在成本控制方面具备优势,凭借高性价比成为行业,为用户提供高价值的测试解决方案。该设备采用国产化组件与自主研发技术,有效降低设备研发与生产成本,相比进口同类设备,价格降低30%~50%,同时在性能、精度等方面完全不输进口设备,甚至在部分指标上实现超越。与普通国产设备相比,武汉朗维的车身姿态测试设备虽然价格略高,但在稳定性、精度、使用寿命等方面具备明显优势,设备故障率低、使用寿命长,长期使用可为用户节省大量维护、更换成本,综合性价比更高。此外,武汉朗维科技有限公司为用户提供一站式采购服务,设备销售、安装调试、操作培训、售后维护等环节无缝衔接,无需用户额外投入...
查看详情>> 2026-04-08 -
 山东多国标兼容汽车稳态回转测试仪价格
山东多国标兼容汽车稳态回转测试仪价格武汉朗维科技有限公司的车身姿态测试设备具备完善的安全保护功能,兼顾了设备安全与操作人员安全,确保测试工作的顺利推进。该设备具备过载保护、短路保护、防雷保护、高温保护等多种安全保护功能,当设备出现过载、短路、雷击、高温等异常情况时,会自动停止运行,切断电源,保护设备部件,避免设备损坏;同时,设备外壳采用绝缘材料制作,具备良好的绝缘性能,可防止操作人员触电,保障操作人员安全。在功能上,设备具备安全报警功能,当出现安全异常情况时,会及时发出声音、灯光报警提示,便于操作人员及时发现并处理;同时,设备支持安全密码设置功能,可设置操作密码,防止非授权人员操作设备,确保设备的使用安全与测试数据的保密性。此外...
查看详情>> 2026-04-07 -
 广西多国标兼容车辆蛇形试验设备
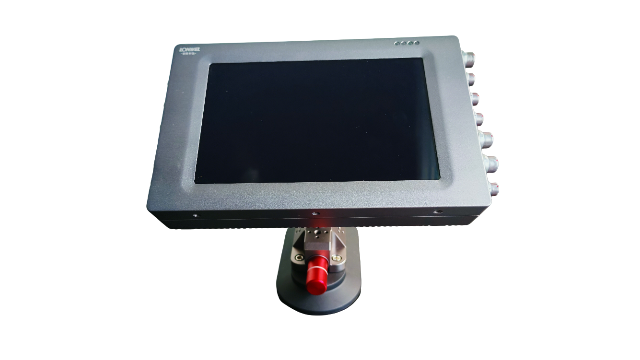
广西多国标兼容车辆蛇形试验设备武汉朗维科技有限公司的车身姿态测试设备注重用户体验,在操作设计上更加人性化,大幅降低了操作人员的工作强度。该设备配备了可旋转高清触控显示屏,操作人员可根据操作习惯,调整显示屏角度,便于查看测试数据与操作界面;同时,设备支持无线遥控操作,操作人员可通过遥控器控制设备的启动、停止、参数调整等操作,无需近距离接触设备,提升了操作的便捷性与安全性。在功能上,设备具备数据自动备份功能,可定期自动备份测试数据,防止数据丢失;同时,设备支持操作日志记录功能,可详细记录操作人员的操作过程,便于后续查询与管理。此外,设备的操作界面支持多语言切换,可适配不同国家与地区的用户需求,提升了产品的通用性与国际竞争力。动...
查看详情>> 2026-03-29 -
 西藏多国标兼容车辆性能测试软件
西藏多国标兼容车辆性能测试软件武汉朗维科技有限公司的车身姿态测试设备注重用户体验,在操作设计上更加人性化,大幅降低了操作人员的工作强度。该设备配备了可旋转高清触控显示屏,操作人员可根据操作习惯,调整显示屏角度,便于查看测试数据与操作界面;同时,设备支持无线遥控操作,操作人员可通过遥控器控制设备的启动、停止、参数调整等操作,无需近距离接触设备,提升了操作的便捷性与安全性。在功能上,设备具备数据自动备份功能,可定期自动备份测试数据,防止数据丢失;同时,设备支持操作日志记录功能,可详细记录操作人员的操作过程,便于后续查询与管理。此外,设备的操作界面支持多语言切换,可适配不同国家与地区的用户需求,提升了产品的通用性与国际竞争力。静...
查看详情>> 2026-03-29 -
 河北多国标兼容车辆滑行测试设备厂家电话
河北多国标兼容车辆滑行测试设备厂家电话武汉朗维科技有限公司的车身姿态测试设备在车辆安全测试领域具备重要作用,可作为赛事安全与车辆安全检测的“隐形护盾”。该设备可实时监测车辆在测试过程中的车身姿态极限状态,当车身侧倾角、俯仰角接近临界值,车辆即将失控时,可及时发出预警信号,便于操作人员及时采取措施,避免事故发生;同时,设备可监测赛车底盘高度,确保车辆符合赛事规则,防止违规降低车身获取空气动力学优势。在碰撞测试中,设备可记录车辆碰撞过程中的3D运动轨迹、车身姿态变化等数据,为事故调查、车辆安全结构优化提供依据,帮助研发团队改进车身安全设计,提升车辆碰撞安全性。此外,该设备可应用于车辆制动安全测试,通过采集车身姿态数据,分析制动过程中车...
查看详情>> 2026-03-27 -
 宁夏汽车稳态回转测试仪价格
宁夏汽车稳态回转测试仪价格武汉朗维科技有限公司研发生产的车身姿态测试设备,以高精度感知技术筑牢产品优势,成为汽车测试领域的设备。该设备搭载先进的惯性测量单元与GNSS接收机,搭配高精度三轴陀螺仪、加速度计等组件,构建起多传感器协同感知系统,如同为汽车装上“智慧感知神经”,可捕捉车辆转向、侧倾、俯仰的细微变化,测量精度远超行业平均水平,侧倾角、俯仰角等关键参数测量误差可控制在极小范围,完美满足汽车研发、法规认证等场景的严苛数据需求。与普通测试设备相比,该设备采用卡尔曼滤波算法,将惯性测量数据与GNSS定位数据高效融合,有效克服单一传感器的局限,解决惯性单元积分漂移、卫星信号受干扰的行业痛点,确保在复杂测试环境下仍能输出稳...
查看详情>> 2026-03-27 -
北京多国标兼容车辆转向姿态综合测试仪厂家
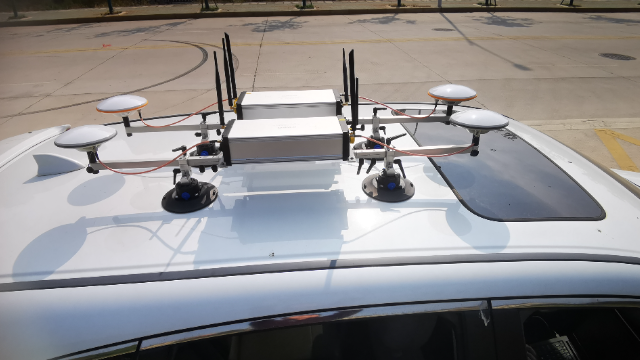
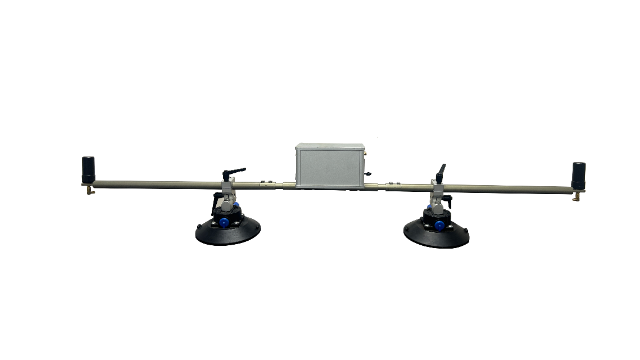
非侵入式安装设计是武汉朗维科技有限公司车身姿态测试设备的特点,兼顾了测试便捷性与车辆安全性。与传统接触式测试设备不同,该设备采用磁性底座或真空吸附装置,可快速固定于车身金属表面或车窗玻璃,无需对被测车辆进行钻孔、焊接等改造,既能保护车辆原始状态,又能大幅缩短测试准备时间,适配多车型快速切换的测试需求。在功能上,设备支持多参数同步采集与分析,可同时捕捉车身侧倾角、俯仰角、振动频率等多项参数,通过数据融合算法,将不同传感器的采集数据进行整合优化,剔除干扰信号,确保数据的可靠性。同时,设备具备良好的通用性,可适配乘用车、商用车、挂车及赛车等多种车型,无需更换测试模块,需简单调试即可投入使用,大幅降低...
查看详情>> 2026-03-26 -
吉林多国标兼容车辆转向盘角阶跃试验设备厂家有哪些
武汉朗维科技有限公司的车身姿态测试设备具备强大的远程操控与诊断功能,可实现设备的远程管理与维护,大幅提升了设备的使用便捷性。该设备支持网络连接功能,可通过局域网、互联网与电脑、手机等终端设备实现连接,操作人员可远程查看设备运行状态、测试数据,控制设备的启动、停止、参数调整等操作,无需亲临测试现场,提升了测试工作的灵活性与高效性。在功能上,设备具备远程诊断功能,专业的技术人员可通过远程连接,实时监测设备运行状态,排查设备故障,提供解决方案,无需上门服务,大幅降低了设备维护成本与时间成本;同时,设备支持远程升级功能,可通过网络自动升级设备固件与数据分析软件,新增功能、优化性能,无需用户手动操作,确...
查看详情>> 2026-03-25 -
中国台湾多国标兼容五轮仪厂家有哪些
武汉朗维科技有限公司的车身姿态测试设备,在车辆通过性测试领域具备优势,可评估车辆在复杂路况下的通行能力,为车辆通过性优化提供数据支撑。车辆通过性是衡量车辆性能的重要指标,尤其是越野车、商用车等,需要在崎岖山路、狭窄弯道等复杂路况下行驶,对通过性要求极高,而武汉朗维的车身姿态测试设备可完美满足通过性测试需求。该设备可测量车辆小转弯直径、外摆值、接近角、离去角、纵向通过角等关键通过性参数,在直角弯道测试中,能准确捕捉车辆外摆值、内轮轨迹半径,判断车辆在狭窄空间内的通行能力;在崎岖路况测试中,可实时监测车身倾斜角度、离地间隙等参数,评估车辆在复杂路况下的通过安全性。设备支持不同车速、不同载荷下的通过...
查看详情>> 2026-03-25 -
浙江车辆转向盘角阶跃试验设备多少钱
武汉朗维科技有限公司的车身姿态测试设备具备的温度补偿功能,可有效消除温度变化对测试数据的影响,确保设备在不同温度环境下的测试精度。温度变化会影响传感器的性能,导致测试数据出现偏差,尤其是在极端温度环境下,偏差更为明显。该设备搭载了高精度温度传感器,可实时监测设备运行环境的温度变化,通过自主研发的温度补偿算法,自动修正温度变化对测试数据的影响,确保测试数据的准确性与稳定性。在功能上,设备支持温度参数实时显示与记录,操作人员可查看不同温度环境下的测试数据,分析温度对车身姿态的影响;同时,设备可自动调整传感器工作参数,适应不同温度环境,确保设备在-40℃至85℃的极端温度范围内,始终保持高精度测试性...
查看详情>> 2026-03-24 -
 湖南多国标兼容车辆方向盘测量厂家有哪些
湖南多国标兼容车辆方向盘测量厂家有哪些武汉朗维科技有限公司的车身姿态测试设备具备车手辅助测试功能,可应用于赛车运动领域,帮助车队量化车手驾驶风格,优化驾驶策略。该设备可通过分析车身侧倾角变化率、俯仰控制精度等数据,量化车手的驾驶平滑度与操作准确性,为车手训练提供的技术依据。例如,在F1、WTCR等赛事中,车队可通过设备采集的车身姿态数据,计算车手在每个弯道的横向G值表现、过弯速度与姿态控制精度,与竞争对手的车手数据进行对比,找出差距,优化驾驶策略。同时,设备可将车身姿态数据与车载HUD结合,使车手实时了解车身状态,根据侧倾角、俯仰角数据调整入弯点、刹车时机,避免过度侧倾导致的轮胎过早磨损,延长轮胎寿命20%以上,提升车队的赛事成绩...
查看详情>> 2026-03-24 -
上海多国标兼容整车运动性能检测设备
武汉朗维科技有限公司的车身姿态测试设备,在车辆通过性测试领域具备优势,可评估车辆在复杂路况下的通行能力,为车辆通过性优化提供数据支撑。车辆通过性是衡量车辆性能的重要指标,尤其是越野车、商用车等,需要在崎岖山路、狭窄弯道等复杂路况下行驶,对通过性要求极高,而武汉朗维的车身姿态测试设备可完美满足通过性测试需求。该设备可测量车辆小转弯直径、外摆值、接近角、离去角、纵向通过角等关键通过性参数,在直角弯道测试中,能准确捕捉车辆外摆值、内轮轨迹半径,判断车辆在狭窄空间内的通行能力;在崎岖路况测试中,可实时监测车身倾斜角度、离地间隙等参数,评估车辆在复杂路况下的通过安全性。设备支持不同车速、不同载荷下的通过...
查看详情>> 2026-03-23 -
山东多国标兼容车载姿态监测设备
武汉朗维科技有限公司的车身姿态测试设备具备强大的异常数据识别与处理功能,可自动识别测试过程中的异常数据,确保测试数据的准确性与有效性。测试过程中,由于环境干扰、设备故障、操作失误等原因,可能会产生异常数据,影响测试结果的准确性。该设备搭载的数据分析软件具备先进的异常数据识别算法,可自动识别测试数据中的异常值、突变值,标记异常数据,并分析异常原因;同时,软件支持异常数据处理功能,可对异常数据进行剔除、修正,确保测试数据的完整性与准确性。在功能上,设备支持异常数据报警功能,当出现大量异常数据时,会及时发出报警提示,便于操作人员排查问题,调整测试方案;同时,设备可记录异常数据的相关信息,包括异常时间...
查看详情>> 2026-03-23 -
江苏多国标兼容车载姿态监测设备厂家有哪些
武汉朗维科技有限公司的车身姿态测试设备,具备出色的多参数同步采集能力,可捕捉车辆姿态的多维度信息,为车辆性能评估提供、的数据支撑。该设备可同步采集侧倾角、俯仰角、航向角、角速度、加速度、位置轨迹、外摆值、转弯直径等二十余种关键参数,涵盖车辆动态性能的各个方面,无需分多次测试即可获取的测试数据,大幅提升测试效率。与普通测试设备只能采集单一或少数几种参数不同,武汉朗维的车身姿态测试设备采用多通道数据采集设计,每个通道工作、互不干扰,可确保多参数同步采集的准确性与同步性,时间同步误差小于1ms,能够捕捉车辆在转向、制动、变道等复杂工况下的姿态变化,反映车辆的动态性能。设备支持参数自定义采集,用户可根...
查看详情>> 2026-03-22 -
陕西车辆蛇形试验设备厂家电话
武汉朗维科技有限公司的车身姿态测试设备,具备极强的多标准兼容能力,为各类车辆测试提供高效便捷的解决方案,凸显出差异化竞争优势。当前汽车制造企业面临多标准并行的检测要求,而该设备集成GB 1589-2016、GB/T12540-2009、JT/T 1178.1-2018等多项国家及行业技术规范,无需更换设备、重复搭建测试环境,即可完成外摆值、最小转弯直径、直角弯道通过性等多项测试项目,有效优化设备投资成本,提升测试产出比。设备的数据采集单元具备高同步性,可确保各传感器信号的时间一致性,进一步提升测量结果的可信度与性,完全符合国家授权检测机构、主机厂对法规符合性测试的严苛要求。武汉朗维科技有限公司...
查看详情>> 2026-03-20 -
海南五轮仪
武汉朗维科技有限公司的车身姿态测试设备,具备良好的经济性,可帮助用户大幅降低测试成本,提升投资回报率,成为性价比极高的测试解决方案。该设备不采购成本低于进口设备,而且在运行、维护、能耗等方面的成本也低于同类设备,长期使用可为用户节省大量成本。设备运行过程中无需频繁更换零部件,故障率低,维护成本每年不超过设备采购成本的2%;其低功耗设计,可大幅降低能耗成本,相比传统设备每年可节省30%以上的电费;同时,设备操作便捷,可减少测试人员数量,降低人力成本。此外,设备的使用寿命长达10年以上,可长期为用户提供可靠的测试服务,无需频繁更换设备,进一步降低用户的设备投入成本。与普通测试设备虽然采购成本低,但...
查看详情>> 2026-03-19 -
安徽车辆动态测试仪有哪些品牌
武汉朗维科技有限公司的车身姿态测试设备,具备低功耗、长续航的优势,可满足户外长时间测试的需求,打破电源对测试工作的限制。该设备采用高效节能的组件与优化的电路设计,功耗控制在10W以内,相比传统设备功耗降低60%以上;同时,设备配备大容量锂电池,容量达到10000mAh,支持快充模式,充电2小时即可满电,满电状态下可连续工作8小时以上,完全满足户外长时间测试的需求,无需频繁连接电源充电,大幅提升测试工作的灵活性与便捷性。与传统设备需要连接市电才能工作,户外测试需要携带笨重的发电机不同,武汉朗维的车身姿态测试设备凭借长续航优势,可在无市电供应的户外场地、偏远地区等场景下正常工作,无需额外携带发电设...
查看详情>> 2026-03-16 -
吉林车辆外摆值测量试验设备价格
武汉朗维科技有限公司的车身姿态测试设备,具备完善的售后服务体系,为用户提供的技术支持与服务保障,让用户使用更安心、更省心。该公司拥有一支专业的售后服务团队,团队成员均具备丰富的设备维修、调试经验,可快速响应用户需求,提供7×24小时全天候服务,无论是设备故障报修、技术咨询,还是操作培训、方案优化,用户都能在时间获得专业解答与帮助。设备销售后,武汉朗维提供上门安装调试服务,安排专业技术人员到现场,协助用户完成设备安装、参数调试、操作培训等工作,确保用户能够快速掌握设备操作方法,顺利开展测试工作;设备质保期长达3年,质保期内提供维修、更换零部件服务,人为损坏除外;质保期结束后,提供终身维护服务,维...
查看详情>> 2026-03-16 -
湖北车辆转向扭矩测量价格
武汉朗维科技有限公司的车身姿态测试设备,具备小巧轻便的结构优势,便于搬运、移动与存储,提升设备的通用性与灵活性,适应不同测试场地的需求。该设备采用轻量化设计,整体重量控制在5kg以内,体积小巧,可轻松放入工具箱中,测试人员可单人携带、搬运,无需借助叉车、起重机等大型搬运设备,大幅提升设备的移动便利性。与传统测试设备体积庞大、重量沉重,需要多人协作、大型设备搬运不同,武汉朗维的车身姿态测试设备可根据测试需求,灵活移动到不同测试场地,无论是室内实验室、户外测试场地,还是狭窄的车间、停车场,都能轻松布置、快速投入使用,有效打破测试场地的限制。同时,设备的存储要求较低,无需存储空间,只需放置在干燥、通...
查看详情>> 2026-03-15 -
贵州车辆轮廓轨迹测量有哪些品牌
武汉朗维科技有限公司的车身姿态测试设备具备强大的参数扩展性,可根据用户需求,灵活增加测试参数,满足不同测试场景的个性化需求。该设备默认支持车身侧倾角、俯仰角、转向角、车身高度等参数的采集与分析,同时预留了多个传感器接口,用户可根据实际测试需求,增加激光位移传感器、振动传感器、温度传感器等配件,拓展测试参数范围,实现车身振动频率、振幅、环境温度等参数的同步采集。在功能上,设备的数据分析软件可自动识别新增传感器的采集数据,进行整合分析,无需升级软件版本,大幅降低了用户的升级成本;同时,软件支持自定义参数显示与分析,用户可根据需求,选择重点关注的测试参数,调整数据展示方式,提升数据分析的便捷性。此外...
查看详情>> 2026-03-15 -
吉林多国标兼容车辆转向盘角脉冲试验设备厂家有哪些
武汉朗维科技有限公司的车身姿态测试设备,具备强大的数据存储能力,可长期存储大量测试数据,方便用户后续查询、对比、分析,为长期技术积累提供有力支撑。该设备内置大容量存储模块,存储容量达到128GB,可存储10万组以上的测试数据与测试报告,无需频繁删除旧数据,可满足用户长期测试数据存储的需求。同时,设备支持外接存储设备扩展存储容量,用户可通过U盘、移动硬盘等外接存储设备,进一步扩大数据存储空间,存储更多测试数据。与普通设备存储容量小、需要频繁导出数据不同,武汉朗维的车身姿态测试设备可长期稳定存储测试数据,测试数据采用加密存储方式,有效保护数据安全性,防止数据丢失、篡改。此外,设备支持数据分类存储功...
查看详情>> 2026-03-14 -
中国台湾整车制动性能检测设备厂家电话
多传感器融合技术是武汉朗维科技有限公司车身姿态测试设备的技术亮点,也是设备实现、高精度测试的关键。该设备整合了高精度惯性测量单元(IMU)、双天线GNSS系统、激光高度计及阻尼电位器等多种传感器,各传感器协同工作,互补短板,实现了车身姿态参数的采集。其中,惯性测量单元内置三轴陀螺仪与加速度计,可快速捕捉车身角度与加速度变化,无需依赖外部参考点;双天线GNSS系统可提供精确的位置、速度和航向信息,提升动态测试的定位精度;激光高度计可实时监测车身高度与悬挂压缩量,为空气动力学分析与底盘调校提供依据。在功能上,设备通过自主研发的数据融合算法,将各传感器采集的数据进行整合与优化,剔除干扰信号,提升数据...
查看详情>> 2026-03-12 -
黑龙江多国标兼容整车操纵稳定性测试设备
武汉朗维科技有限公司的车身姿态测试设备,具备的轨迹还原能力,可还原车辆行驶轨迹与车身姿态变化过程,为车辆性能分析提供更直观的支撑。该设备依托高精度GNSS定位技术与惯性测量技术,可实时捕捉车辆在三维空间中的位置坐标,结合多维度姿态参数,还原车辆在转向、制动、变道、转弯等各类工况下的行驶轨迹与车身姿态变化,轨迹还原误差小于5cm,能够清晰呈现车辆每一个瞬间的姿态状态。测试完成后,设备可生成动态轨迹模拟视频,直观展示车辆行驶过程中的车身倾斜、尾部摆动等变化,方便测试人员、工程师更直观地分析车辆性能问题,比如通过轨迹还原发现车辆转弯时外摆值超标、变道时车身稳定性不足等问题,为针对性优化提供依据。与普...
查看详情>> 2026-03-11