-
 05 12泰州直线RGV生产厂家
05 12泰州直线RGV生产厂家RGV小车直线往复式一般只有一个RGV,做直线运动和往复运动,其效率低于圆形RGV系统。结构上,RGV主要由车架、主动轮、从动轮、前后保险杠、链式输送机、通讯系统、电气系统和各种盖板组成。由于RGV结构简单,对外界环境的抗干扰能力强,对操作人员要求宽泛,运行稳定性强,故障相对较少,整体维护成本相对较低,可靠性高。正因为RGV只能在轨道上行... 【查看详情】
-
02 12连云港RGV供应商家
RGV小车根据功能的不同,RGV可以分为两种类型:装配RGV系统和运输RGV系统,主要用于物料运输和车间装配。按运动方式可分为环形轨道式和直线往复式。环形轨道式RGV系统效率高,可同时工作,一般采用铝合金轨道;通常,直线往复式RGV系统包括一个RGV往复,其效率低于环形RGV系统。AGV系统广泛应用于智能仓储和柔性生产线,也是众多制造业提... 【查看详情】
-
 29 11镇江全自动堆垛机厂家
29 11镇江全自动堆垛机厂家堆垛机按照有无导轨可分为有轨堆垛机和无轨堆垛机,有轨堆垛机是指堆垛机沿着巷道内的轨道运行,无轨堆垛机又称为高架叉车。在立体仓库中运用的主要作业设备有有轨巷道堆垛机、无轨巷道堆垛机和普通叉车。有轨巷道堆垛机分类方式多种多样,如按支承方式、用途、控制方式、结构、运行轨迹等分类。但无论何种类型的堆垛机一般都由水平行走机构、起升机构、载货台及货叉... 【查看详情】
-
 26 11连云港自主导航AGV供应商
26 11连云港自主导航AGV供应商AGV小车的技巧:1.故障检测功能在工程项目中,AGV小车的系统软件也具有完善的故障检测功能。例如,当AGV小车运行不成功时,用户可以根据AGV小车的实时软件,监控查询小车在运行状态下的运行日志和数据,实现人机交互技术。2.智能操作AGV小车智能管理系统可以承接各种信息订单。可以实现订单信息和相关参数的传输。在这个日常任务中,也可以从AG... 【查看详情】
-
 23 11
23 11 -
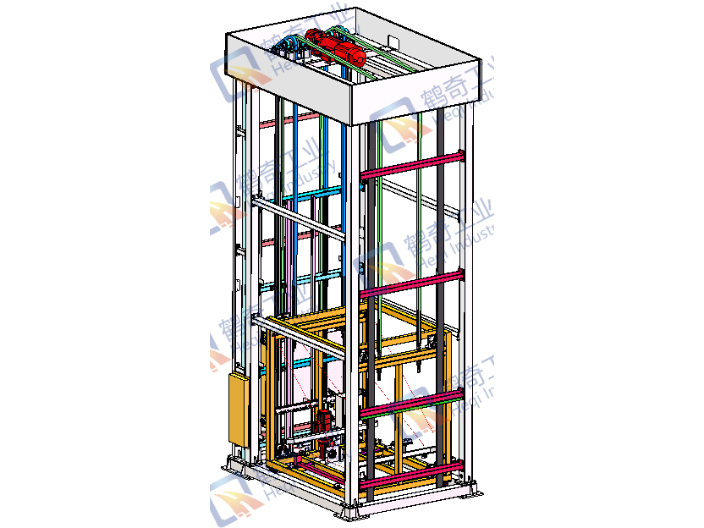
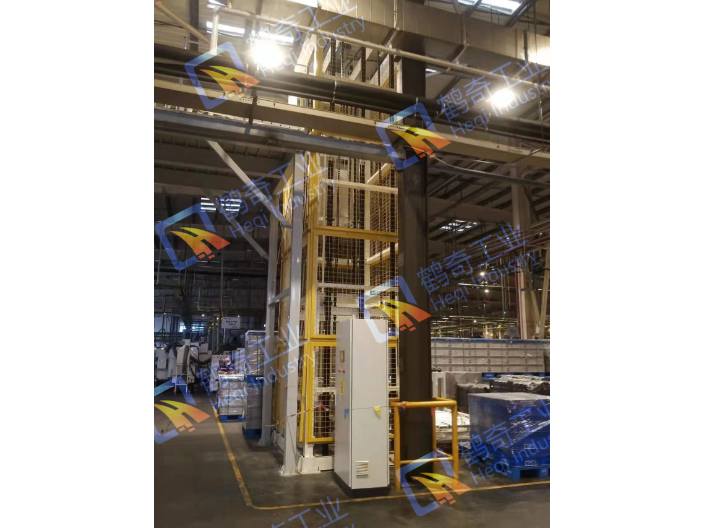 20 11河南往复式提升机哪家好
20 11河南往复式提升机哪家好循环式提升机机器的安全:特殊的光电及钢丝绳装置,同步提升机的轿厢运行轨迹,任何运行异常均可检测出来,针对正常安全运行时,如链条运行是否卡阻,松动、断裂,轿厢卡阻,倾斜,做到提前报警,提示检修功能,更不会造成轿厢坠落。 台车货物安全,线体上设多处光电开关,实时监测每个台车位置,避免造成台车在输送线上位置不清,碰撞等可能。人身的安全:整个输送... 【查看详情】
-
 17 11重庆全自动堆垛机价格
17 11重庆全自动堆垛机价格堆垛机示例(a)桥式堆垛起重机;在桥式起重机的基础上结合叉车的特点开发而成,悬挂在升降小车上的刚性立柱上有可升降的货叉,立柱可以绕垂直中心线旋转,因此货架之间所需的巷道宽度小于叉车所需的巷道宽度。这种起重机在两侧高架轨道上支撑和运行,除了一般单位货物外,还可以堆放和运输长物品。当起重能力和跨度较小时,还可以在屋架下悬挂的轨道上运行,此时其... 【查看详情】
-
 14 11山东自动化堆垛机生产厂家
14 11山东自动化堆垛机生产厂家巷道堆垛机的模块化结构具有良好的灵活性和适应性,能够满足客户的需求。所有模块都可以组合以符合规范,因此所有产品都可以基于应用程序进行分层配置。因此,升级或改造现有仓库以获得更好的性能是没有问题的。静态效率:桅杆角度可以无限修正。即使工作了很多小时,也能保证更好的精度。低振动和刚性桅杆设计较大缩短了单次运动之间的阻尼时间。因此,即使是远程模... 【查看详情】
-
 11 11辽宁立体库堆垛机哪家好
11 11辽宁立体库堆垛机哪家好起重机堆垛机由提升驱动装置和绳索绞车组成。起重机周围搭建了一个维护平台,以确保安全和较好的维护。升降驱动装置包括:螺旋锥齿轮装置(带油浴润滑、油膨胀罐、油视镜、油尺和排气装置);三相异步电动机(鼠笼式转子用于低压和逆变器),盘式制动器(浮动卡钳中的弹簧驱动制动器),爪形联轴器(故障保护、扭转灵活性),供油系统(带压力润滑的油气冷却器)。绳... 【查看详情】
-
 08 11浙江RGV小车供应商
08 11浙江RGV小车供应商穿梭车RGV又称(轨道导向车),也称为轨道穿梭车,是一种与地面导轨接触的运输车辆。小车主要由车架、驱动轮、从动轮、前后保险杠、链式输送机、通讯系统、电气系统和各种盖板组成。它广泛应用于物流系统中,具有速度快、可靠性高、成本低的特点。根据功能的不同,可分为两种类型:装配RGV系统和运输RGV系统,主要用于物料运输和车间装配。按运动方式可分为... 【查看详情】
-
 05 11内蒙古有轨堆垛机厂家直销
05 11内蒙古有轨堆垛机厂家直销江苏鹤奇工业自动化设备有限公司作为自动化仓库建设和智能设备的制造商,积累了十多年的设计、生产和安装经验。公司推出的高性能堆垛机基于雄厚的技术力量和产品研发能力,执行严格的技术和电气控制标准,具有设备稳定性好、故障率低、设计科学完善、使用寿命长、维护成本低、安全性能高等特点,赢得了客户的一致好评。江苏鹤奇堆垛机由机架(上梁、下梁和立柱)、水... 【查看详情】
-
 02 11天津全自动堆垛机厂家
02 11天津全自动堆垛机厂家双柱堆垛机是自动化仓库的主要组成部分之一,不同于单柱堆垛机。框架结构是由上横梁和下横梁两个立柱组成的矩形框架,其结构刚度比单个立柱更好,质量更大。适用于各种提升高度的仓库。一般起重能力可达5T,必要时可更大。可用于高速运行。双柱堆垛机运行在货架之间的巷道中,主要用于运输装载在托盘或集装箱上的单位货物;也可以开车到相应的货舱,船上人员会根据... 【查看详情】

