-
 郑州直销力控打磨值得推荐
郑州直销力控打磨值得推荐因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复...
查看详情>> 2024-02-29 -
 厦门通用力控打磨
厦门通用力控打磨气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,气动打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化圆棒工件...
查看详情>> 2024-02-28 -
 厦门精密力控打磨共同合作
厦门精密力控打磨共同合作在研磨加工中企业为了快速投产,通常用机器人来实现打磨作业,机器人打磨采用了DFC力控打磨系统,以及打磨工具、自动换砂纸设备。可以替代人工和去毛刺的机床设备,用于对铸件、钣金件、洁具、电脑笔记本、手机等壳体的打磨、去毛刺自动化加工。加装D力控打磨的机器人研磨自动化系统从加工零件和产品的表面快速有效地去除多余的材料。无论在什么行业,批量生产中有打磨工序,就不能没有自动化设备,而打磨工艺作业的非标准性及对打磨动作的灵活要求,成为通用打磨机的技术障碍。将打磨机、力控打磨系统DFC和机器人结合成为单个机器人打磨系统或完整的机器人打磨设备,辅以传输线和相应的夹具技术研发成完整的打磨工序自动化生产线,可...
查看详情>> 2024-02-28 -
 通用力控打磨操作简单
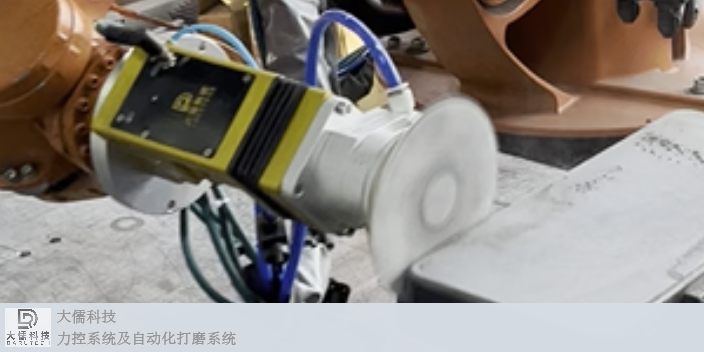
通用力控打磨操作简单产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、六维力-力矩传感器、打磨工具、工作台、路径规划与力控反馈软件系统及PC机。力控打磨机器人主要是打磨力控制技术,通过控制加工轨迹和打磨工具与工件的接触力,以满足力和位置两方面的工艺要求,保证打磨质量。大儒科技的力控打磨系统通过力控制系统控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。用途实时监控、力控反馈、精密微调、稳定高效。力控打磨 ,就选...
查看详情>> 2024-01-31 -
泉州直销力控打磨操作简单
气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,气动打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化圆棒工件...
查看详情>> 2024-01-31 -
 本地力控打磨装置
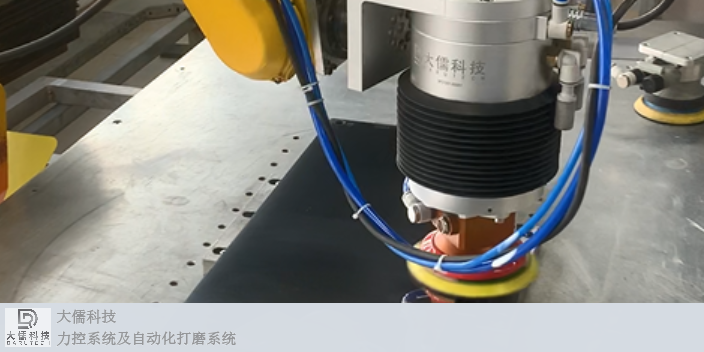
本地力控打磨装置机器人在打磨及抛光领域应用越来越多,安装FDFC力控打磨实现的力控打磨工作台。当打磨机器人就位执行设置好的打磨路径,通过DFC力控打磨控制实时的打磨力,当工件与浮动抛光电机构的接触压力增大时,DFC力控打磨系统则减少推动力;当接触压力减少时则加大推动力。DFC力控打磨工作台进一步的提高了打磨质量,通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。本打磨系统通过浮动式抛光电机实现了在打磨过程中工件与磨具之间压力...
查看详情>> 2024-01-23 -
 本地力控打磨答疑解惑
本地力控打磨答疑解惑平面、箱体和异形钣金,在制造业应用很多,比如机械工业,机器设备,汽车等等。因工艺的需求,会经过一些加工方式来达到我们想要的规格,常见的有火焰切割,锯切等,而经过后续的加工,会产生大量毛刺和割手边,这非常不利于往后工艺要求,需要打磨去除。对于平面钣金的打磨去毛刺方法,例如机器人打磨,安装DFC打磨力控打磨,只需要在DFC力控打磨执行器末端安装原有的打磨工具,配合对应的打磨耗材,合理实现了打磨时工具与工件的适度压紧与松开;工作过程结果表明:传动机构将减速电机输入的扭矩分别输出至上、下磨座,带动二者来回交错运动,由钢丝平刷对行进中的钢板进行板面清理及打磨除浮锈。而人工打磨和打磨机两种方法工作效率低、...
查看详情>> 2024-01-20 -
韶关什么是力控打磨操作简单
随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨效率低,同时打磨后的效果得不到保证,综合成本高,且打磨后的碎屑容易残留在工件上,不利于标准化生产。目前在工件加工完成后经常需要使用打磨机对其包面进行打磨,使其表面光滑均匀。现有的打磨机一般均为手持式打磨机,工作人员需要手持打磨机然后对工件表面进行打磨处理。这种方式存在以下缺陷:在面对圆柱形杆或者是圆柱形管等圆形形的工件时,因为工件表面均为弧面,工作人员对工件打磨时比较费力,且打磨出来的工件表面很难...
查看详情>> 2024-01-19 -
 重庆官方力控打磨来电咨询
重庆官方力控打磨来电咨询因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复...
查看详情>> 2024-01-18 -
浙江直销力控打磨打磨
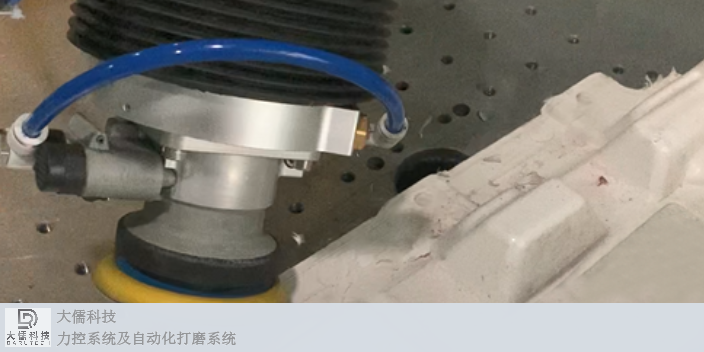
DFC力控打磨末端安装不同种类的气动研磨工具,使其更适合各种汽车,木工家具,3C产业的表面砂打磨和砂光。气动打磨机研磨速度快,有效缩短作业时间;轻巧、平衡性高、使用长时间不易疲劳;使用木工家具、轻毂、金属研磨、汽车钣金涂装、研磨、修面,羽状边研磨。气动长指头式砂光机用于狭小,复杂,难进入研磨的部位研磨;木器外壳,手机外壳轮圈研磨。狭小不易研磨的曲面,也可完美解决,操作容易适合小角度,死角处研磨。气动拉丝机为您解决金属制品的划痕,焊接后的打磨抛光与各种纹路的修复问题,处理的纹路修复效果(真丝纹,雪花纹,段纹,亚光,镜面等)能完全跟您要求的原版纹路。要配相应的耗材。用于电器(微波炉、抽烟机、消毒柜...
查看详情>> 2024-01-18 -
 韶关直销力控打磨供应商
韶关直销力控打磨供应商电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控打磨安装在机器人上,力控打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书进行安装和操作即可快速投入打磨生产。力控打磨 ,就选大...
查看详情>> 2024-01-17 -
广州购买力控打磨值得推荐
针对薄壁件的自动打磨问题,安装使用智能打磨力控打磨是简单有效的恒力打磨加工方法。通过在KUKA工业机器人末端的气动柔顺力的控制功能使得打磨工具始终压紧被加工表面,且压力大小保持恒定,根据规划路径调整机器人的末端位姿,同时按照设定参数自动更换砂纸等耗材,进一步保证打磨的质量。目前加工轨迹表面复杂、精度要求高的自由曲面类零件打磨抛光基本都是由人工手持作业工具并依赖于工人的经验来完成的,这很难保证自由曲面零件的形位精度、表面微观物理属性,且制造成本较高,制约了成型模具加工技术的发展;尤其是目前的人工作业难以保证质量的一致性及加工效率,据统计精整加工占整个模具制造工时的42%左右,繁重的作业任务及低效...
查看详情>> 2024-01-17 -
 深圳什么是力控打磨供应商
深圳什么是力控打磨供应商产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、六维力-力矩传感器、打磨工具、工作台、路径规划与力控反馈软件系统及PC机。力控打磨机器人主要是打磨力控制技术,通过控制加工轨迹和打磨工具与工件的接触力,以满足力和位置两方面的工艺要求,保证打磨质量。大儒科技的力控打磨系统通过力控制系统控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。用途实时监控、力控反馈、精密微调、稳定高效。大儒科技(苏州)...
查看详情>> 2024-01-16 -
 泉州力控打磨厂家直供
泉州力控打磨厂家直供随着社会的发展,越来越多家具和装修需要使用石材,而对于石材表面的平整要求也越来越高,需要对石材表面进行打磨抛光,实现平面光滑整洁,而现有的打磨操作一般需要工人使用打磨工具对石材表面一点点打磨抛光,这种打磨方式耗时耗力,打磨的效率不高,对工人的劳动强度也大,加大了人工成本。针对这些问题,安装了DFC智能力控打磨力控的石板平面自动打磨设备,能够克服解决这些问题。其中动力装置能够为石板打磨提供动力,使打磨机自由移动,转动装置能够使打磨机前后往复移动,实现对石板的前后打磨,研磨装置能够使打磨机向右前进,对石板平面打磨,此设备能够自动完成对石板平面的打磨,无需人工操作,节约了人力成本,也能够减少工作人员...
查看详情>> 2024-01-16 -
广州购买力控打磨研磨
客户终端采用气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化...
查看详情>> 2024-01-15 -
广州什么是力控打磨详情
机器人在打磨及抛光领域应用越来越多,安装FDFC力控打磨实现的力控打磨工作台。当打磨机器人就位执行设置好的打磨路径,通过DFC力控打磨控制实时的打磨力,当工件与浮动抛光电机构的接触压力增大时,DFC力控打磨系统则减少推动力;当接触压力减少时则加大推动力。DFC力控打磨工作台进一步的提高了打磨质量,通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。本打磨系统通过浮动式抛光电机实现了在打磨过程中工件与磨具之间压力...
查看详情>> 2024-01-15 -
唐山官方力控打磨现价
平面、箱体和异形钣金,在制造业应用很多,比如机械工业,机器设备,汽车等等。因工艺的需求,会经过一些加工方式来达到我们想要的规格,常见的有火焰切割,锯切等,而经过后续的加工,会产生大量毛刺和割手边,这非常不利于往后工艺要求,需要打磨去除。对于平面钣金的打磨去毛刺方法,例如机器人打磨,安装DFC打磨力控打磨,只需要在DFC力控打磨执行器末端安装原有的打磨工具,配合对应的打磨耗材,合理实现了打磨时工具与工件的适度压紧与松开;工作过程结果表明:传动机构将减速电机输入的扭矩分别输出至上、下磨座,带动二者来回交错运动,由钢丝平刷对行进中的钢板进行板面清理及打磨除浮锈。而人工打磨和打磨机两种方法工作效率低、...
查看详情>> 2024-01-14 -
 唐山购买力控打磨技术指导
唐山购买力控打磨技术指导加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控打磨由二种先进的基本...
查看详情>> 2024-01-12 -
深圳智能力控打磨技术指导
客户终端采用气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化...
查看详情>> 2024-01-10 -
安徽精密力控打磨技术指导
在木门、衣柜厨柜门等表面雕琢后需要进行打磨,从而使后续的上油漆过程中节省油漆同时提高油漆的均匀性,现有技术主要是通过拿砂纸来回摩擦实现,其不但费时费力,而且由于人工的力度在各个阶段可能各不相同,从而也会影响打磨的质量,故而也会影响打磨的效果及效率,难以满足后续加工操作,故而适用性和实用性受到限制。DFC智能力控打磨力控打磨帮助企业现有设备实现柔性的自动化批量产生。充分利用客户现有设备,安装打磨力控打磨的力控打磨设备,操作便捷,其不但可以有效且快速的实现门板的打磨操作,而且整体打磨操作中力度相同,从而有利于提高打磨的效率与打磨的质量,并且可以实时调整,有利于提高打磨的均匀性,适用性强且实用性好。...
查看详情>> 2024-01-09 -
北京本地力控打磨供应商
电气柜是由钢材质加工而成用来保护元器件正常工作的柜子。电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控打磨安装在机器人上,力控打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书...
查看详情>> 2024-01-09 -
韶关购买力控打磨技术指导
针对薄壁件的自动打磨问题,安装使用智能打磨力控打磨是简单有效的恒力打磨加工方法。通过在KUKA工业机器人末端的气动柔顺力控制功能使得打磨工具始终压紧被加工表面,且压力大小保持恒定,根据规划路径调整机器人的末端位姿,同时按照设定参数自动更换砂纸等耗材,进一步保证打磨的质量。目前加工轨迹表面复杂、精度要求高的自由曲面类零件打磨抛光基本都是由人工手持作业工具并依赖于工人的经验来完成的,这很难保证自由曲面零件的形位精度、表面微观物理属性,且制造成本较高,制约了成型模具加工技术的发展;尤其是目前的人工作业难以保证质量的一致性及加工效率,据统计精整加工占整个模具制造工时的42%左右,繁重的作业任务及低效率...
查看详情>> 2024-01-08 -
 唐山力控打磨欢迎咨询
唐山力控打磨欢迎咨询加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控打磨由二种先进的基本机能...
查看详情>> 2024-01-08 -
安徽销售力控打磨厂家直供
随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨效率低,同时打磨后的效果得不到保证,综合成本高,且打磨后的碎屑容易残留在工件上,不利于标准化生产。目前在工件加工完成后经常需要使用打磨机对其包面进行打磨,使其表面光滑均匀。现有的打磨机一般均为手持式打磨机,工作人员需要手持打磨机然后对工件表面进行打磨处理。这种方式存在以下缺陷:在面对圆柱形杆或者是圆柱形管等圆形形的工件时,因为工件表面均为弧面,工作人员对工件打磨时比较费力,且打磨出来的工件表面很难...
查看详情>> 2024-01-07 -
郑州购买力控打磨装置
产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、六维力-力矩传感器、打磨工具、工作台、路径规划与力控反馈软件系统及PC机。力控打磨机器人主要是打磨力控制技术,通过控制加工轨迹和打磨工具与工件的接触力,以满足力和位置两方面的工艺要求,保证打磨质量。大儒科技的力控打磨系统通过力控制系统控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。用途实时监控、力控反馈、精密微调、稳定高效。大儒科技(苏州)...
查看详情>> 2024-01-06 -
 直销力控打磨来电咨询
直销力控打磨来电咨询电气柜是由钢材质加工而成用来保护元器件正常工作的柜子。电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控打磨安装在机器人上,力控打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书...
查看详情>> 2024-01-06 -
唐山直销力控打磨研磨
在工业制造领域,有很多零件需要在焊接、铸造、成型或加工后进行后处理,包括打磨,抛光。例如新能源汽车行业的电池托盘、变速箱壳体、汽车轮毂。目前大部分工件打磨加工作业大多采用机器人安装手持气动,电动工具进打磨,研磨等方式进行打磨加工,机器人缺乏打磨所需要的柔性力控制,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题。普通的机器人机器人打磨的方案由于机械臂刚性,定位误差等其他因素,需要安装DFC实现力控打磨,使其力控打磨,取得更好的均匀性和一致性。力控打磨 ,就选大儒科技(苏州)有限公司,让您满意,欢迎您的来电!唐山直销力控打磨研磨电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧...
查看详情>> 2024-01-05 -
 江苏购买力控打磨值得推荐
江苏购买力控打磨值得推荐因需尽量准确地确定机器人运转路径,编程工作繁复而耗时。传统技术尽管在学说上可获得恒定的研磨抛光质量,然而实情并不尽如人意,加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑...
查看详情>> 2024-01-03 -
 深圳官方力控打磨共同合作
深圳官方力控打磨共同合作而且传统的工件清理技术使用位置支配法则,因需尽量准确地确定机器人运转路径,编程工作繁复而耗时。传统技术尽管在学说上可获得恒定的研磨抛光质量,然而实情并不尽如人意,加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发...
查看详情>> 2024-01-01 -
安徽什么是力控打磨研磨
加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控打磨由二种先进的基本机能...
查看详情>> 2024-01-01
 热门标签
热门标签