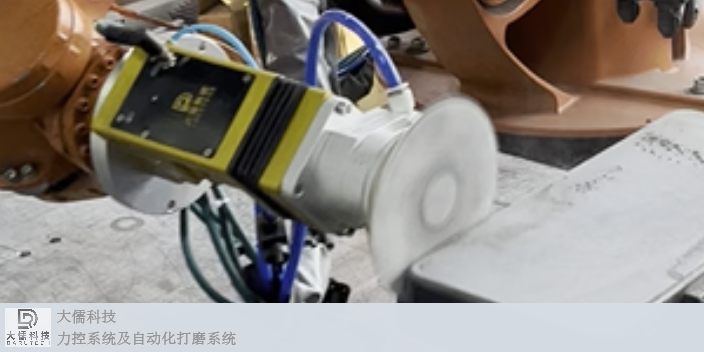
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。DFC智能柔性打磨力控系统已在手机、笔记本、音箱、等客户实际应用。泉州直销力控打磨详情

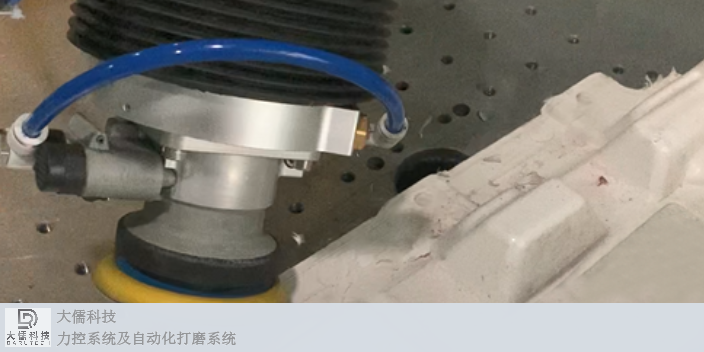
去毛刺飞边机器人是用于材料去除毛刺,锐边处理,或鳍过的金属部件。六轴去毛刺机器人带动铣刀能向人手拿锉刀一样,从铸件四周和上面的任意角度和位置,非常灵活、快速、准确去掉铸件表面的料口和合模线,深孔内部的毛刺及铣通和整理一些应贯通而被铝皮覆盖的孔。工业生产中的部分零配件需要对其外表面进行打磨抛光,比如圆棒工件,现有技术中,采用电机驱动的砂轮对圆棒工件的外表面进行打磨,圆棒工件都有一定的长度,实际打磨时砂轮固定不动,圆棒工件移动,砂轮与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,存在打磨效率低,圆度不一致的缺陷,有待于改善。为解决上述技术问题,智能柔性打磨力控系统安装在机械手上,力控打磨使得不变化圆棒工件安装位置的情况下一次性打磨结束,打磨效率高,工件打磨后的圆度一致性好,简单实用。泉州直销力控打磨详情你了解智能柔性打磨力控系统吗?
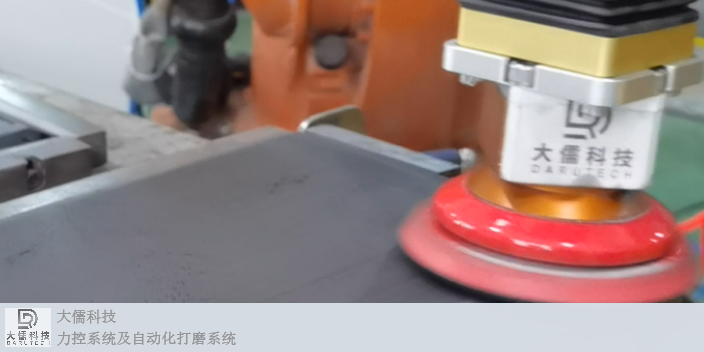
电气柜是由钢材质加工而成用来保护元器件正常工作的柜子。电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨力控系统安装在机器人上,柔性打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨力控系统其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书进行安装和操作即可快速投入打磨生产。
随着人工费用成本的增加,同时由于工作环境的恶劣,使用工业机器人代替人工进行去毛刺打磨抛光工作变得越来越普遍甚至迫在眉睫!但工业机器人进行去毛刺打磨抛光工作时使用的工具一般都必须是柔性打磨的力控系统,而不能使用刚性工具!例如需要毛刺打磨抛光的铸造共建,由于模具精度等各方面因素,铸件总会存在铸造飞边、分模线和铸造尺寸公差和形位公差;如果采用刚性工具去毛刺打磨抛光,就必须精确控制机器人的运动轨迹以拟合工件边沿;由于机器人的定位精度比较高,这样如果有1000个工件就必须有1000个程序来拟合工件外形,否则就会伤及工件本体或者根本没有将毛刺去除,而这是不可能的!因此必须采用一种特殊的工具-智能柔性打磨力控系统来吸收这个公差,这正是力控的柔性工具产生的原因!大儒科技的打磨力控系统的特点:柔性浮动力控执行系统,降低了机器人编程的难度,变得非常简单。

DFC力控系统目前有多个型号,适合不同打磨、抛光工作场景。力控系统柔性打磨过程,可根据工件公差和细微的位置偏移瞬间调整、保持力的大小在设定范围之内,保证了表面效果的一致性。与机器人的完美融合,可以明显降低调试门槛,机器人只需控制打磨路径,力控系统控制打磨力,使打磨力可量化,对部分公差或形变较大的钣金、冲压、塑胶件等,仍可保证效果一致。大儒科技(苏州)有限公司由专业技术团队组成,位于长三角苏州工业园区,耗时多年研发设计的DFC智能柔性打磨抛光力控系统,帮助企业实现自动化打磨,并取得更好的一致性和均匀性效果,提升良率,降本增效;DFC力控系统是通用型的柔性力控制工具,可以实现所有材质工件表面的打磨、抛光、去焊缝、去毛刺、去除合模线、清洁等的自动化需求;普遍适用于3C、汽车、家具、家电、厨卫、航空航天、运动用品、新材料新能源等领域,已经帮助全国很多客户,解决了打磨抛光自动化实现难的痛点,并实现了出口,远销欧洲;并荣获了苏州工业园区科技人才、姑苏科技创新天使等荣誉。 大儒科技的DFC智能柔性打磨力控系统可以大幅降低机器人的采购成本。泉州直销力控打磨详情
DFC智能柔性打磨力控系统主要通过对传统打磨机器人柔性改造,赋予工业机器人精细化打磨工艺。泉州直销力控打磨详情
市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。泉州直销力控打磨详情
大儒科技(苏州)有限公司位于方泾路2号,交通便利,环境优美,是一家服务型企业。公司是一家私营有限责任公司企业,以诚信务实的创业精神、专业的管理团队、踏实的职工队伍,努力为广大用户提供***的产品。公司拥有专业的技术团队,具有力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人等多项业务。大儒科技顺应时代发展和市场需求,通过**技术,力图保证高规格高质量的力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人。