点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。由于机器人的操作精度高,可以准确地控制打磨的力度、速度和方向,从而确保产品在各个方面的质量一致性。淮安机器人自动打磨抛光
力(力矩)操控方法在打磨机器人的应用中起着至关重要的作用。当机器人执行如安装、抓放物体等任务时,除了需要精确的定位,还要求所施加的力或力矩必须适中。为了实现这一目标,就需要使用到(力矩)伺服方法。这种操控方法的原理与位置伺服操控原理基本相似,但其输入量和反馈量不是位置信号,而是力(力矩)信号。因此,这种控制体系中必须有相应的力(力矩)传感器。在某些情况下,还会使用到接近、滑动等传感功能,以实现自适应式操控。铸件打磨机器人供应商使用打磨机器人的使用可以降低生产成本。

再者,抛光打磨是一项需要高度专业技能的工作,工人的技术水平直接影响着产品的质量和生产效率。然而,随着年轻一代对工作环境和待遇要求的提高,他们越来越不愿意从事这个行业。这导致了企业面临着严重的人力资源短缺问题,尤其是在技术熟练的工人方面。新员工的培训和熟练过程往往需要花费大量的时间和精力,这无疑增加了企业的运营成本和时间成本。人工抛光打磨的另一个问题是容易受到人为因素的干扰。由于工人的技术和情绪波动等因素,产品的质量和生产效率往往会出现不稳定的情况。这不仅影响了企业的声誉和市场竞争力,还可能导致客户流失和订单减少。
机器人打磨抛光去毛刺具有明显的优势。密闭式的机器人工作站能够将高噪音和粉尘与外界隔离,有效减少环境污染,保护工人的健康。由于操作工不直接接触危险的加工设备,可以避免工伤事故的发生,保障生产安全。机器人具有精确的控制系统和高度重复性的作业能力,能够保证产品加工精度的一致性,从而确保质量的可靠性和降低废品率。更为重要的是,机器人替代熟练工不仅可以降低人力成本,而且不会因为操作工的流失而影响交货期。机器人可以24小时连续作业,极大地提高了生产效率。机器人还具有可再开发性,用户可以根据不同样件进行二次编程,缩短产品改型换代的周期,减少相应的投资设备。保持打磨机器人的良好运行需培训机器人操作员。

在工业制造领域,随着产品质量的不断提高,制造工艺要求也日益严苛,工业机器人单纯依靠传统的位置控制已经无法满足某些高精度、高复杂度的操作需求。比如,在进行精密零部件的柔性装配,或是对一致性较差的复杂曲面进行打磨时,传统位置控制方式的局限性就暴露无遗。尤其是在处理一致性较差的复杂曲面时,由于位置误差可能导致工件或机器人本身受到损坏。柔性打磨力控系统,作为单独的控制执行系统,专注于抛光打磨领域,旨在解决自动化升级过程中的重要挑战,并为客户提供多方面的成本降低和效率提升方案。打磨机器人可以在一定程度上地提高生产线的自动化水平。湖南铸铁件打磨机器人
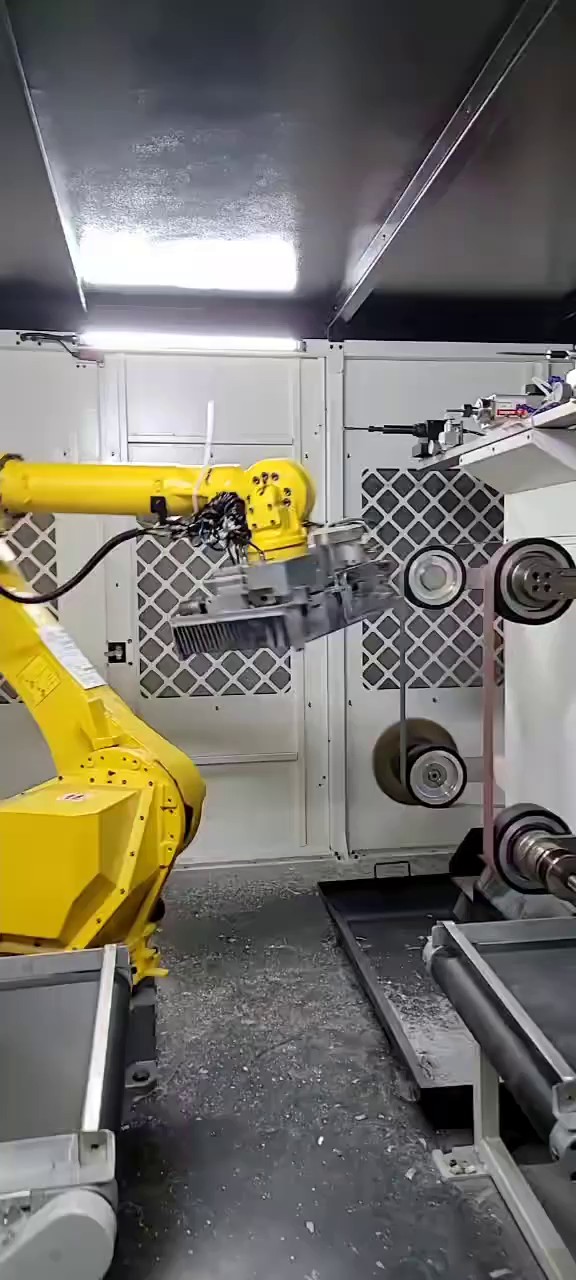
打磨机器人能够填补人力缺口,确保工作的持续进行。淮安机器人自动打磨抛光
机器人换人已成为去毛刺打磨抛光等恶劣工况下的必然趋势。通过采用机器人打磨抛光技术,企业可以明显提高生产效率、降低成本、保证质量,并有效避免工伤事故的发生。因此,对于寻求提高竞争力和可持续发展的企业来说,机器人换人已成为一个迫切而重要的选择。机器人力控打磨工具具有轴向和360度内径向的力控浮动功能,这一创新工具的出现成功解决了机器人在去毛刺、打磨和抛光主轴工具方面所面临的问题。这款力控浮动去毛刺打磨抛光工具,针对难加工的边角、交叉孔等不规则形状的毛刺及表面进行打磨抛光时,其浮动机构和刀具能够顺应工件的毛刺面进行加工,模拟人手进行柔性去除毛刺、打磨和抛光操作。淮安机器人自动打磨抛光