工业机器人常常在预先设定的路径上精确执行,其运行轨迹固定,误差极小。然而,当工件的表面尺寸存在微小的公差,或者定位位置稍有偏差时,打磨效果就会产生明显的变化。可能会出现打磨不到位、压力过大导致过度打磨等问题,进而使得良品率大幅下降,难以满足批量生产的需求。为了应对这一问题,柔性力控打磨系统应运而生。这一系统内置了多种传感器,能够实时检测打磨过程中的压力、设备自身的姿态、加速度等重要信息。通过其独特的重力补偿算法,柔性力控打磨系统能确保设备在任何姿态下都能与工件表面保持稳定接触,并维持打磨力的恒定。打磨机器人具有长时间连续工作能力和低运营成本。打磨珠子机器厂商
传统的工业机器人通过其高效且精确的位置控制,遵循着控制系统为其设定的路径,在空间中进行精确的移动,进而出色地完成如搬运、检测、喷涂、上下料等一系列作业。然而,随着工业自动化步伐的加快,机器人正逐渐扩展其应用领域,涉足更普遍的工业环境。在这种背景下,单纯的位置控制已逐渐显示出其局限性,特别是在那些需要机器人与环境进行交互作用的应用场景中。在工业制造领域,随着产品工艺标准的不断提高,许多新的制造工艺已无法通过传统工业机器人的位置控制来完美实现。例如,对于精密零部件的柔性装配,或者一致性较差的复杂曲面打磨等任务,传统的位置控制方法可能因工件的一致性问题导致位置误差,从而引发系统瞬间的过载,这不仅可能损坏工件,还可能对机器人本身造成损害。因此,为了满足这些更复杂的工艺需求,我们必须对传统工业机器人的控制方式进行创新和改进。自动打磨机器哪里有卖打磨机器人在工作过程中,紧固件可能会松动或变形。

连续轨道操控则更注重打磨机器人在达到目标点的过程中所遵循的路径。这种操控方式要求机器人能沿着预设的连续路径进行精确的运动,从而实现对复杂形状和曲面的精确打磨。因此,连续轨道操控通常用于需要高精度、高稳定性的打磨任务中。力(力矩)操控则是一种更高级的操控方式,它要求打磨机器人在作业过程中能根据实时的力反馈进行动态调整,以实现对不同材质、不同表面状况的工件的精确打磨。这种操控方式需要机器人具备高度灵敏的力感知和反馈系统,以及强大的实时处理能力。
打磨机器人的结构设计要满足高精度和高刚度的要求。高精度是指机器人在进行打磨过程中能够准确地按照预定的路径进行移动,并保持理想的打磨效果。高刚度是指机器人在进行打磨过程中能够承受较大的力矩和振动,不出现变形或者抖动。为了满足这些要求,打磨机器人的结构设计通常采用刚性较高的材料,并采用特殊的机械结构,例如齿轮传动和导轨导向等。打磨机器人的控制系统要具备高精度和高速度的控制能力。高精度是指机器人的定位和运动控制能够达到亚毫米级别的精度,以实现精确的打磨效果。高速度是指机器人在进行打磨过程中可以快速地移动,提高生产效率。为了满足这些要求,打磨机器人的控制系统通常采用高精度的编码器和传感器进行反馈控制,并配备高速度的电机和驱动器,以实现快速准确的定位和运动。机器人打磨技术可以通过自动化和智能化的手段,提高产品质量,并减少人工操作的风险。

机器换人技术的应用不仅提高了生产效率,更重要的是,它为企业带来了全方面的安全保障。从改善工人的工作环境,到提升生产现场的整体安全水平,自动化生产线的引入都是一次积极的变革。随着技术的不断进步,我们有理由相信,未来的工业生产将更加安全、高效、环保。相较于传统的抛光打磨专机,机器人抛光打磨的应用展现出了更高的灵活性。对于广大的中小型制造业企业来说,市场的外部环境要求他们遵循订单批次的生产模式。这意味着生产线必须根据每个订单批次的需求进行相应的调整。在这方面,专机往往需要进行大规模的改动,这既费时又费力。打磨机器人可以通过搭载传感器和摄像头,实时感知工件的形状和位置。江苏铝件打磨
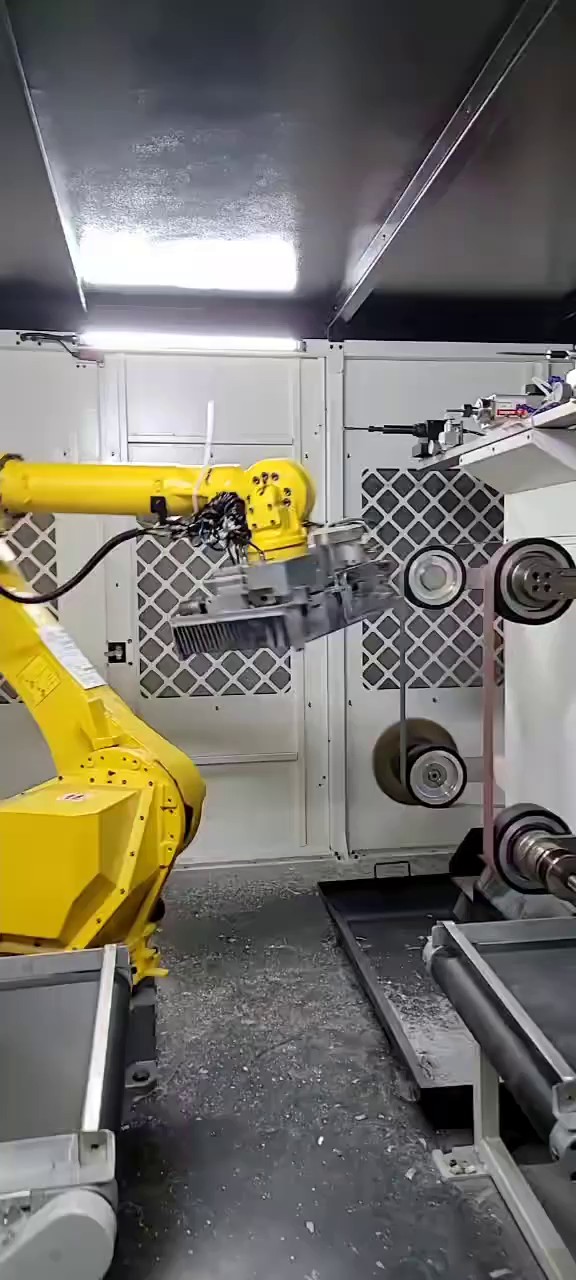
打磨机器人在汽车制造领域有着普遍的应用。打磨珠子机器厂商
点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。打磨珠子机器厂商