堆垛机在X方向的定位通过条形码定位系统行进,并通过光电管进行精细定位。E-Stoplimit开关用于在堆垛机工作范围的后一端立即关闭堆垛机。桅杆设计为箱体结构,板材和型材焊接结构。支柱安装在运输部件上,并通过上十字头在顶部连接。在桅杆1上,安装了控制柜平台和起重机平台。带有制动电阻器的平台安装在桅杆2上。在两个桅杆之间,升降平台由伸缩台和控制站引导。维护平台也连接到上部区域的两根桅杆上。上十字头堆垛机上部为上十字头。这包括一个抗扭刚焊接框架。通过导辊在上部十字头上,堆垛机在机架结构上部区域的轨道上引导。外导向轮和内导向轮用于使钢丝绳偏转。如果举升平台移动超过其上端位置,则缓冲器会减弱冲击.缓冲器与堆垛机运输部分上的缓冲器一起,避免与第二堆垛机发生碰撞。巷道式堆垛起重机的组成有:起升机构、运行机构、货台司机室和机架等,起升机构采用的是钢丝绳或链条提升。天津堆垛机销售厂家

巷道堆垛机:巷道堆垛机沿货架仓库巷道内的轨道运行,可以使作业高度提高;采用货叉伸缩机构,使货叉可以伸缩,这样就可以使巷道宽度变窄,提高仓库的利用率;巷道堆垛机一般采用半自动和自动控制装置,运行速度和生产效率都较高;其只能在货架巷道内作业,因此要配备出入库装置;机架除应满足一般起重机的强度和刚度要求外,还有较高的制造与安装精度要求;采用特殊型式的取物装置,常用多节伸缩货叉或货板;各机构电气传动调速要求高,且要求起制动平衡,停车准确,采用安全保护装置,措施齐全。无锡巷道堆垛机哪家好堆垛机按自动化程度不同可分手动、半自动和自动堆垛机。

堆垛机使用方法:堆垛机可以在三维空间移动负载:沿着过道中的货架(行驶,x方向);货架高度(升降,y方向);朝向货架(Z方向)。运输部分:堆垛机的基础就是运输部分。这包含一个抗扭钢焊接框架。机架两侧的驱动轮由质量钢42CrMo4制成,强度较高。车轮两侧均采用闭球形滚装机支撑,通过运输部件上的轴承箱连接的轴承。运输部件的驱动通过2个螺旋锥齿轮装置行进。运输部分由导轨上的导向辊引导,确保传动装置的正好对中轮子。轮子滚轮可通过偏心装置进行调整。作为防倾装置的夹轨器是运输部设备的一部分。钢轨刮削机清理导轨上的异物,从而防止车轮损坏。缓冲器与堆垛机上横梁上的缓冲器一起防止与第二台堆垛机发生碰撞。对于维护工作,可以将举升平台放置在缓冲器上。6个双收集器从安装在基础上的导体轨道获取堆垛起重机的动力。
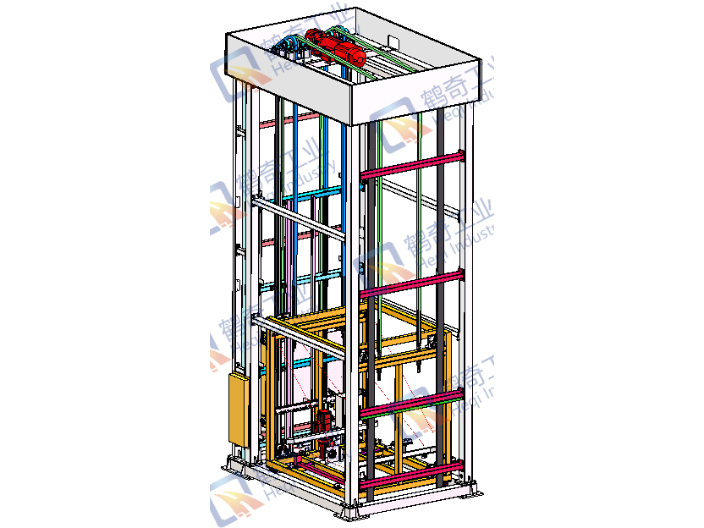
堆垛机从结构形式上区别,目前立体仓库中堆垛机有双立柱结构和单立柱结构。双立柱结构的堆垛机机架由两根立柱和上横梁、下横梁组成一个长方形框架。立柱形式有方管和圆管。方管兼作起升导轨,圆管附加起升导轨。双立柱堆垛机的优点就是强度和刚性都比较好,并且运行平稳。一般对于起重高度较高、起重量较大和水平运行速度高的立体仓库堆垛机多采用双立柱结构。双立柱堆垛机的起升机构,普遍采用链条传动,由电机减速机驱动链轮转动,通过链条引载货台沿立柱或起升机导轨作升降运动。由于链条牵引载货台或配重装置,受空间尺寸限制,传动和布置较复杂,但定位较准确。堆垛机较常见的是按结构形式和运行轨迹分类。

堆垛机控制系统:堆垛机的控制系统采用西门子STEP7300系列PLC作为上位控制,下位控制由变频器驱动异步电动机实现,堆垛机水平轴、垂直轴、货叉运行均采用变频器控制异步电机调速,通过激光测距传感器、条码定位器、绝对值编码器反馈的位置值来定位。控制系统的网络拓扑通过PN/IE(Profinet)网络协议将PLC与变频器、编码器、激光测距传感器连接,变频器通过现场总线接收PLC发出的启动停止命令,同时将变频器在线数据电流、电压、电机的运行状态反馈至上位控制系统。本项目将变频器的运行信号采集到PLC作为判断堆垛机水平轴完全停车的保护程序。堆垛机的基础就是运输部分。吉林巷道堆垛机供应商家
有轨巷道堆垛机分类方式多种多样,如按支承方式、用途、控制方式、结构、运行轨迹等分类。天津堆垛机销售厂家
堆垛机可以较大提高立体仓库的面积和空间利用率,减少人工干预,有效提高仓储系统的运行效率和自动化程度。江苏鹤奇工业自动化设备有限公司可为客户提供单列堆垛机、双柱堆垛机、翻转堆垛机、双伸缩堆垛机和微型装载机等。可以根据各种产品无论大小、轻重,量身定制各种类型的堆垛机设备,而不考虑尺寸和重量。堆垛机作为立体仓库的重要运输设备,将直接影响整个立体仓库的运行效率和经济效益。堆垛机类型的合理选择将较大提高整个系统的运行效率和经济效益。天津堆垛机销售厂家