快速原型控制器作为一种高效、灵活的开发工具,受到了广大工程师和研发人员的青睐。快速原型控制器,顾名思义,是一种能够迅速实现控制算法原型的硬件设备。它能够在电控系统的开发过程中替代产品控制器硬件,支持图形化建模和自动代码生成技术。通过将建模与仿真阶段所形成的控制算法模型下载到快速原型控制器硬件中,并连接实际被控对象,可以实现控制算法的硬件在环仿真验证和实物验证。这一过程不仅缩短了开发周期,提高了开发效率,而且能够在开发阶段早期实现标定,为后续的批量生产提供了可靠的技术支持。快速原型控制器采用高性能硬件平台,能够支持复杂控制任务,满足高性能要求。长沙变流器算法迭代
模块化快速原型控制器的一个优点是其强大的扩展性。由于采用模块化设计,控制器可以方便地添加新的功能模块或扩展接口,以适应不同的应用场景。这种扩展性使得控制器能够普遍应用于各种制造业领域,如汽车制造、电子制造、机械制造等。在汽车制造领域,模块化快速原型控制器可用于实现控制算法的快速迭代评估。通过添加特定的功能模块和接口,控制器可以与生产线上的各种设备进行无缝对接,实现自动化生产过程中的精确控制和协调。这种应用不仅提高了开发效率,还降低了测试成本。辽宁变流器算法迭代快速原型控制器还具备强大的通信能力,可以与其他控制器、传感器和执行器进行高速、稳定的数据交换。
RCP系统提供了一系列实用工具,方便用户在实际测试过程中进行快速的调试分析。这些工具可以帮助用户快速定位并解决问题,减少在软硬件调试上花费的时间。此外,通过隔离开发过程中的软硬件问题,RCP还能够提高开发效率,减少不必要的返工和修改;RCP平台具有高度的灵活性和可扩展性,能够满足多种项目的研发需求。用户可以根据项目的具体要求,选择合适的硬件配置和软件工具,构建符合需求的快速原型控制器。此外,随着技术的不断进步和需求的不断变化,RCP平台还能够进行升级和扩展,以适应新的应用场景和更高的要求。
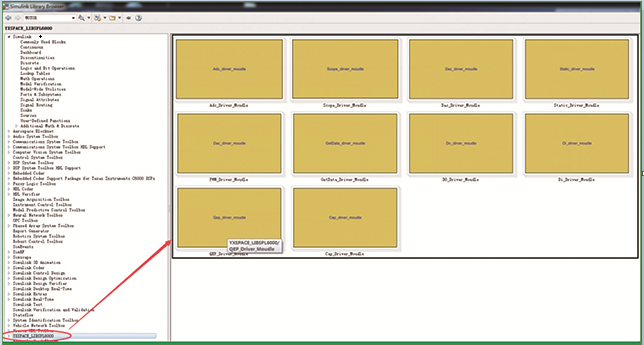
快速原型控制器在工业控制场合中的应用——电机是工业控制场合中常见的被控对象之一。快速原型控制器可以应用于电机的速度控制、位置控制等场景。通过实时接收电机的反馈信号,如转速、位置等,并根据控制算法计算出相应的控制信号,实现对电机的精确控制。这种控制方式不仅提高了电机的控制精度和稳定性,还降低了能耗和维护成本。在机器人控制领域,快速原型控制器也发挥着重要作用。机器人控制系统需要实现复杂的运动轨迹规划和实时控制。快速原型控制器能够实现对机器人运动学、动力学等模型的快速构建和仿真测试,帮助开发者验证和优化控制算法。同时,通过与实际机器人的实时连接,快速原型控制器还可以对机器人的运动轨迹进行精确控制,提高机器人的运动性能和稳定性。快速原型控制器在Simulink的库浏览栏中,添加研旭的驱动库。

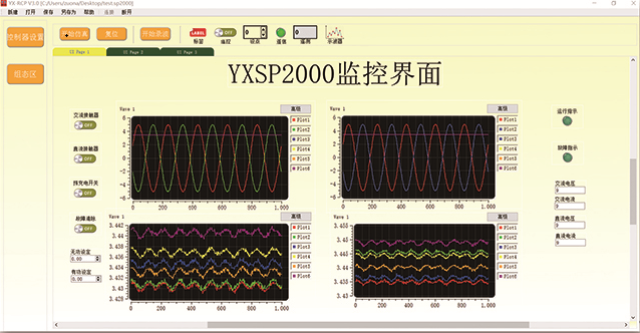
快速原型控制器支持实时监测和在线调参功能。这意味着在开发过程中,开发者可以实时观察控制器的运行状态和参数变化,从而快速发现控制算法中存在的问题。同时,通过在线调参功能,开发者可以方便地调整控制参数,优化控制效果。这种实时监测和在线调参的能力提高了开发效率和调试的便捷性。快速原型控制器具有高度的灵活性,能够适应多种应用场景的需求。无论是三维打印机、CNC加工中心还是激光快速成型机等设备,都可以通过快速原型控制器实现数字信号控制和指令解码,实现快速原型的制造。此外,快速原型控制器还可以应用于自动驾驶车辆、车辆稳定性控制、混合动力/纯电动整车控制等领域,满足各种复杂控制需求。快速控制原型控制器是一种将先进的数字信号处理器(DSP)技术与快速原型技术相结合的控制器。辽宁变流器算法迭代
快速原型控制器的响应速度极快,能够在毫秒级别内完成控制指令的传输和执行。长沙变流器算法迭代
智能化快速原型控制器具备快速的响应速度和高效的控制能力。其内部集成的先进算法和强大的计算能力,使得控制器能够在极短的时间内对输入信号进行分析和处理,并输出相应的控制指令。这种快速响应的特性使得控制器在实时控制系统中具有明显的优势,能够有效应对各种突发情况和复杂控制任务。智能化快速原型控制器还支持多通道并行处理,能够同时控制多个执行机构,提高系统的整体控制效率。在工业自动化、机器人控制等领域,这种高效的控制能力有助于实现更加准确和高效的生产过程,提升企业的竞争力。长沙变流器算法迭代