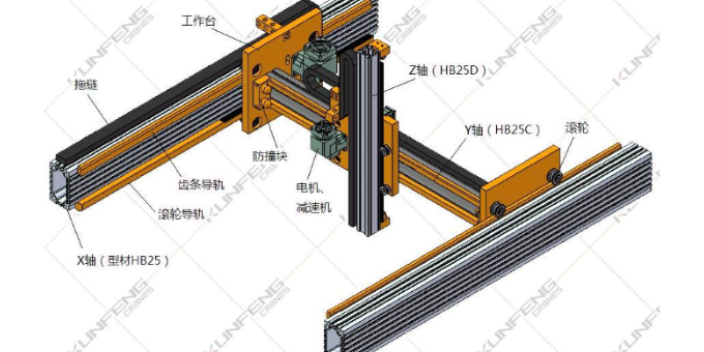
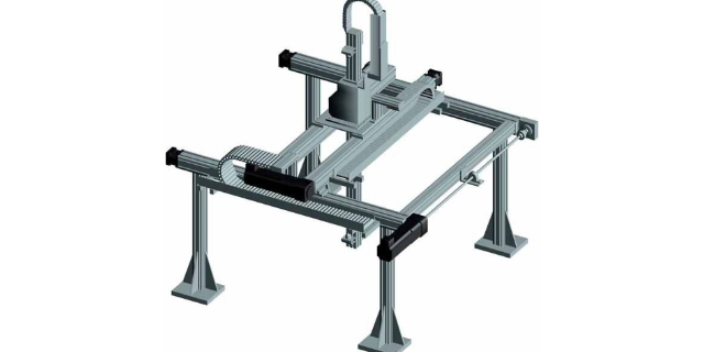
数控桁架机械手主要实现机床制造过程的*自动化,采用集成加工技术,适用于生产线上下材料、工件翻转、工件转动顺序等。桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。根据机器人结构分类为直角坐标类型,机械手沿二维直角坐标系移动。主体部分通常采用由y到梁和导轨的龙门结构,z由滑枕、十字滑座、立柱、过渡连接板和基座组成,z交流伺服电机通过蜗轮减速器驱动齿轮和y向横梁,z将固定在滑枕上的齿条滚动,驱动移动部件沿导轨快速移动。移动部件为轻质十字滑座和Z滑枕,滑枕采用铝合金拉型材。横梁采用方形钢型材,横梁上安装有导轨和齿条。整个机械手通过滚轮与导轨接触悬挂在上面。桁架式机械手相当于人的臂,但桁架机械手依靠机器工作。杭州关节机械手厂家
数控机床上下料机器人应用***大多数数控车床机械手的自动化生产线都有主动控制.补偿.校正.护理和其他功能,产生自我维护功能。它可以有效地应用于不同的专业领域,以满足生产需要。数控机床本身具有多种功能,多功能数控机床促进了制造业的快速发展。机床自动化已成为经济增长的主流。数控机床的自动化不*是一个有吸引力的优势,而且也为生产带来了便利,融入了各行各业.各生产类别。装卸机械手广泛应用于自动化生产线。数控车床装卸机械手的卸机械手已成为高新技术领域快速发展的新技术。它促进了机器人机械手的发展,使它们能够结合机械化和自动化。为了降低劳动强度,改善劳动条件,可以说机械手主要用于数控加工。渐渐地,桁架数控车床机械手.数控车床数控桁架机械手和多段机械手的应用越来越***。温州桁架机械手定制机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。

机械手的形式特征有哪些?如当今的机械手主要以电机为动力。具有结构简单、重量轻、运行速度快、运行可靠、节能环保等优点。那么伺服机械手的形式特点是什么?直接类型是只允许手臂沿着三个笛卡尔坐标移动一条直线。即手臂只进行弹性提升和平移。运动比例图可以是直线、矩形平面或长方体。伺服机械手多自由度机械手是一种模拟人体肢体功能,自动控制肢体,按一定要求输送工件,操作工具的自动化生产设备。反向过渡型手臂中伺服机械手的操作水平是倒置的。结合手臂的弹性和变化,形成一个完整的反向过渡伺服机械手。它的特征被组合成一个圆圈,它的特征动作是相反的。为方便起见,这被称为反向。正反转伺服机械手具有动作直观性强、空间小、结构紧凑、工作规模大等优点。目前,大多数是一种类型。
机械手的形式特征有哪些?投球类型除了水**转外,这种运动伺服机械手还具有手臂俯仰活动。这两种活动和手臂的弹性运动组成了一个完整的俯仰伺服机械手。它的运动比例图是一个空心球体,它的运动函数是俯仰。俯仰伺服机械手尺寸和空间相同,可以延伸到地面,完成从地面提取工作的任务。缺点是动作不直观,结构混乱,手臂有两个相反的动作,手臂末端的位置误差随着手臂的伸展而增加。伺服机械手及屈伸臂它由上臂和前臂组成。伺服机械手液压机械手采用液压动力和电液伺服控制,具有工作灵活、负载刚性高等优点。适用于高精度、高速响应、高输出/大重量、高输出的货物运输。它的结构类似于人的上肢,具有较大的手臂伸展半径和提取高度灵活的球形工件的能力。早期进口的机械手大都用他们自己制造的齿轮机构减速。

机械手有什么特点呢?原材料多样化第1大类是机械制造业包括机械加工、轻工机械等以金属材料作为加工的原料,如钟表、缝纫机、自行车和家用电器等耐用消费品的加工。第二大类是以农、林、牧、副及化工产品等非金属材料作为加工的原料,如食品机械中的糕点机械以农产品为主要原料;罐头、酿造机械以农、副产品为主要加工原料;制浆造纸机械以林产品和农副产品为原材料;皮革机械以畜牧产品为主要原料;陶瓷、玻璃、塑料机械则以矿物、化工产品为其原料。其表明自动化机械手及自动生产线应用领域***模块化机械手设计,快速适应多样化工件搬运。宁波上下料机械手定制
浙江勃展工业自动化设备有限公司致力于提供机械手设备,有想法的不要错过哦!杭州关节机械手厂家
桁架机械手动作原理?由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。杭州关节机械手厂家