- 品牌
- 桐尔
- 型号
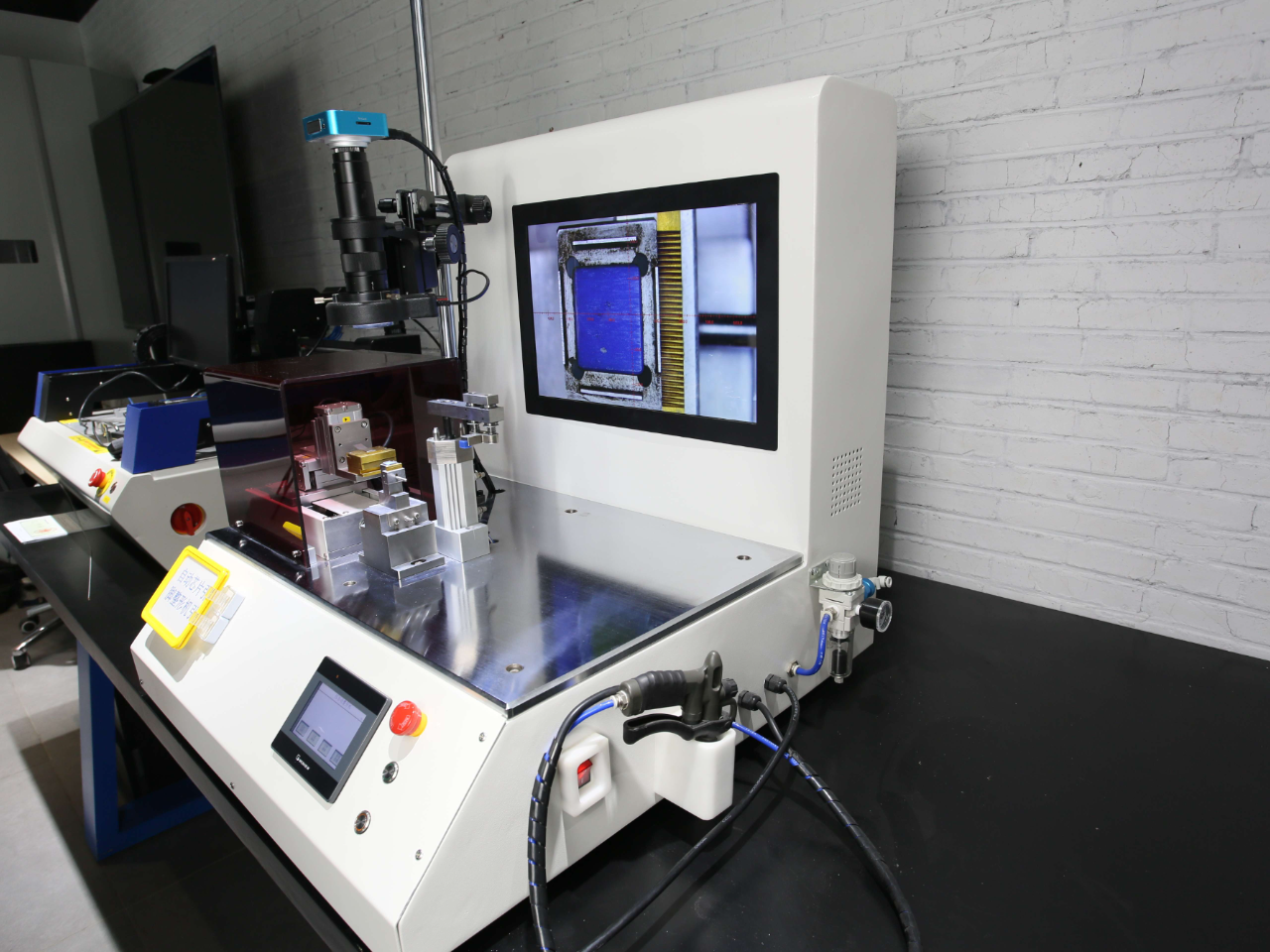
- TR-50S 芯片引脚整形机
TR-50S 芯片引脚整形机的机械手臂通常采用高精度的伺服控制系统来实现对芯片引脚的高精度整形。机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现精确定位和运动控制。X/Y/Z轴驱动系统通常采用伺服电机和精密滚珠丝杠等高精度运动部件组成,能够实现微米级别的运动精度。在整形过程中,机械手臂首先将芯片放置在定位夹具上,然后根据预设的整形程序,通过高精度X/Y/Z轴驱动系统实现芯片引脚的精确定位和调整。伺服控制系统可以实时监测和调整运动位置和速度,以确保整形过程的精确性和稳定性。此外,机械手臂还配备了高精度的传感器和反馈系统,可以实时检测芯片引脚的形状和位置信息,并根据反馈信息调整运动轨迹和整形程序,以确保良好的整形效果。总之,半自动芯片引脚整形机的机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现高精度的运动控制和整形过程,确保每个芯片引脚都能够得到良好的修复效果。上海桐尔芯片引脚整形机在未来的发展趋势是什么?有哪些可能的改进或升级?南京自动化芯片引脚整形机实时价格
上海桐尔在为某航天级电子设备提供整套封装解决方案时,创造性地提出了"引脚-焊盘-基板"协同设计理念。该项目中,由于芯片引脚与陶瓷基板的热膨胀系数差异导致在极端温度条件下出现微裂纹,该公司通过其超景深数字显微镜分析系统,重新设计了具有应力缓冲结构的引脚形态,使产品通过了-55℃~125℃的1000次循环测试。上海桐尔的工程案例库显示,在涉及多物理场耦合的复杂系统中,引脚设计需要同时考虑电气性能、机械强度和热管理要求。该公司开发的智能数据追溯系统可以记录每个引脚的工艺参数,为后续设计迭代提供数据支撑。特别是在汽车电子领域,上海桐尔协助客户建立的引脚设计规范,成功将车载芯片的早期失效率降至0.3ppm以下。这些经验证明,只有将引脚设计放在整个系统架构中通盘考虑,才能确保终端产品的可靠性。江苏多功能芯片引脚整形机欢迎选购上海桐尔TR-50S芯片引脚整形机以±0.03毫米精度将变形引脚恢复JEDEC标准。

并且推荐地在部分c3外的绝缘体106的一部分(部分410)上延伸。在图4的步骤中,三层结构140形成在部分c3的内部和外部。三层结构140形成在位于部分c3内部的层120的部分上,并且也形成在沟槽104的绝缘体106上,推荐地与绝缘体106接触。三层结构140可以全部沉积在步骤s2中所获得的结构的上表面上。在图5的步骤中,三层结构140在部分c3的内部和外部被蚀刻。通过该蚀刻完全去除层140的水平部分。然而,实际上,层140的部分510可以保持抵靠层120的侧面。图6和7的步骤对应于图2c的步骤s6。在步骤s5中在层120上形成氧化硅层220。氧化硅层220可以在层120的侧面上延伸(部分610)。在图6的步骤中,在步骤s5中获得的结构上形成导电层240。在该步骤中,导电层240推荐地覆盖结构的整个上表面。在图7的步骤中,蚀刻围绕部分c3的部分结构。因此,所获得的电容元件264对应于由*位于部分c3中的层120、220和240形成的绝缘堆叠。作为示例,去除位于相关沟槽104的绝缘体106上的部分c3外部的所有区域。换句话说,堆叠264的侧面对应于层120、220和240的叠加侧,并且对应于部分c3的边缘。每个层120、220和240的侧面未被导电层的部分覆盖。在未示出的下一步骤中,可以用电绝缘体覆盖堆叠710的侧面。
所述浮置栅极和所述控制栅极包括第五导电层和第六导电层。根据某些实施例,芯片包括位于存储器单元的浮置栅极和控制栅极之间的三层结构的第二部分,浮置栅极和控制栅极推荐地分别包括第二层和第三层的部分。在下面结合附图在特定实施例的以下非限制性描述中将详细讨论前述和其他的特征和***。附图说明图1a-图1c示出了形成电子芯片的方法的实施例的三个步骤;图2a-图2c示出了图1a-图1c的方法的实施例的三个其他步骤;图3示出了电容式电子芯片部件的实施例;图4至图7示出了用于形成电子芯片的电容部件的方法的实施例的步骤;以及图8是示意性地示出通过用于形成电容部件的方法的实施例获得的电子芯片的结构的横截面视图。具体实施方式在不同的附图中,相同的元件用相同的附图标记表示。特别地,不同实施例共有的结构元件和/或功能元件可以用相同的附图标记表示,并且可以具有相同的结构特性、尺寸特性和材料特性。为清楚起见,*示出并详细描述了对于理解所描述的实施例有用的步骤和元件。特别地,既没有描述也没有示出晶体管和存储器单元的除栅极和栅极绝缘体之外的部件,这里描述的实施例与普通晶体管和存储器单元兼容。贯穿本公开。模块化夹具支持5×5到50×50毫米芯片,5分钟换型满足多品种批量生产需求。

通过部分c3中的层120的上表面的热氧化以及部分t3中的衬底的热氧化获得层220。热氧化可以增加层200的厚度。推荐地,在步骤s5之后,三层结构140的厚度在约12nm至约17nm的范围内,推荐地在12nm至17nm的范围内,例如。推荐地,在步骤s5之后,层200的厚度在约4nm至约7nm的范围内,推荐地在4nm至7nm的范围内,例如。层220的厚度推荐小于层200的厚度。推荐地,层220的厚度在约2nm至约3nm的范围内,推荐地在2nm至3nm的范围内,例如。在图2c中所示的步骤s6中,在步骤s5之后获得的结构上形成包括掺杂多晶硅或掺杂非晶硅的导电层240。层120是完全导电的,即不包括绝缘区域。推荐地,层240由掺杂多晶硅制成。作为变型,层240包括导电子层,例如金属子层,导电子层具有搁置在其上的多晶硅。层240具有在每个部分c1、c2、c3、m1、t2和t3中的一部分。层240的这些部分被定位成与部分c1、c2、c3和m1的层120的部分竖直排列。层240推荐地与部分m1和c1中的三层结构140接触。在部分c2和c3中,层240分别与层200和220接触。在部分t2中,层240推荐地与层200接触,但是可以在层200和层240之间提供一个或多个附加层,例如介电层。在部分t3中,层240推荐地与层220接触。系统自动识别芯片型号并调用对应程序,新手也能在触摸屏上一键启动整形流程。本地芯片引脚整形机现货
真空吸附配合弹性压紧机构,芯片在夹具内零位移,保证共面性≤0.1毫米。南京自动化芯片引脚整形机实时价格
实时向芯片引脚发送输入数据,对电路进行实时操作。此外,该夹具的制造成本低廉,可作为消耗品使用,从而保证高精度检测或输入。本发明提供的芯片引脚夹具用于辅助外部设备与芯片引脚相连,该芯片引脚夹具包括绝缘的壳体和导电的弹片。壳体包括柱体,柱体包括***侧平面,在***侧平面上设有***凹槽,***凹槽沿柱体的轴向方向延伸至壳体的底面,***凹槽中部的深度大于***凹槽上部及***凹槽下部的深度。***凹槽的左侧面和/或右侧面设置有凸起,凸起沿柱体的轴向方向延伸,凸起与***凹槽的上侧面之间具有***间隙,凸起与***凹槽下部的底面之间具有第二间隙,***间隙和第二间隙均不小于待测芯片的引脚厚度,芯片引脚夹具通过***间隙和第二间隙夹持芯片引脚。壳体的顶面设有第二凹槽。壳体还包括通孔,通孔贯通***凹槽的上侧面和第二凹槽的底面。弹片与上述通孔的内壁紧靠,弹片延伸至***凹槽中部形成触点部,触点部与凸起的**短距离不大于芯片引脚的厚度,触点部用于与芯片引脚接触。弹片还延伸至第二凹槽形成转接部,转接部通过第二凹槽暴露于壳体外,转接部用于连接外部设备。本发明通过凸起、***间隙以及第二间隙可以稳定可靠的固定芯片引脚。南京自动化芯片引脚整形机实时价格

上海桐尔在芯片引脚整形机领域的创新上海桐尔在芯片引脚整形机领域展现了强大的研发实力和技术创新能力。公司推出的芯片引脚整形机采用了高精度视觉定位系统和智能控制算法,能够实现对不同类型芯片引脚的快速、精细整形。设备还具备自适应功能,能够根据芯片引脚的形状和尺寸自动调整参数,确保整形效果的一致性。上海桐尔还注重设备的稳定性和可靠性,通过优化机械结构和采用高质量材料,延长了设备的使用寿命,降低了客户的维护成本。这些创新使得上海桐尔的芯片引脚整形机在市场上具有***的竞争优势。在使用半自动芯片引脚整形机时,如何培训员工进行正确的操作和维护?江苏智能芯片引脚整形机常见问题 半自动芯片引脚整形机的...
- 上海智能芯片引脚整形机联系方式 2026-06-29
- 上海国产芯片引脚整形机厂家价格 2026-06-08
- 整套芯片引脚整形机价格 2026-05-27
- 江苏国产芯片引脚整形机用途 2026-05-13
- 南京智能芯片引脚整形机技术指导 2026-05-12
- 江苏附近哪里有芯片引脚整形机租赁 2026-05-05
- 江苏制造芯片引脚整形机产品介绍 2026-05-01
- 江苏安装芯片引脚整形机一般多少钱 2026-04-22
- 上海加工芯片引脚整形机工厂直销 2026-04-21
- 江苏制造芯片引脚整形机设计 2026-04-17


- 购买芯片引脚整形机常用知识 2026-03-30
- 南京直销芯片引脚整形机常见问题 2026-03-24
- 江苏制造芯片引脚整形机供应商 2026-03-18
- 机械芯片引脚整形机租赁 2026-01-14
- 江苏半自动芯片引脚整形机价格查询 2026-01-13
- 南京附近哪里有芯片引脚整形机使用方法 2026-01-09




- 江苏智能芯片引脚整形机常见问题 07-01
- 贵州JC736-CS钢网清洗机值得推荐 06-30
- 上海智能芯片引脚整形机联系方式 06-29
- 黑龙江JC736-CS钢网清洗机技术指导 06-26
- 湖北哪些搪锡机私人定做 06-24
- 广东什么是搪锡机认真负责 06-23
- 辽宁IBL汽相回流焊接诚信合作 06-22
- 湖北IBL汽相回流焊接有哪些 06-19
- 上海整套搪锡机性能 06-17
- 北京什么搪锡机种类 06-16